


Flanger
Администратор
-
Зарегистрирован
Весь контент Flanger
-
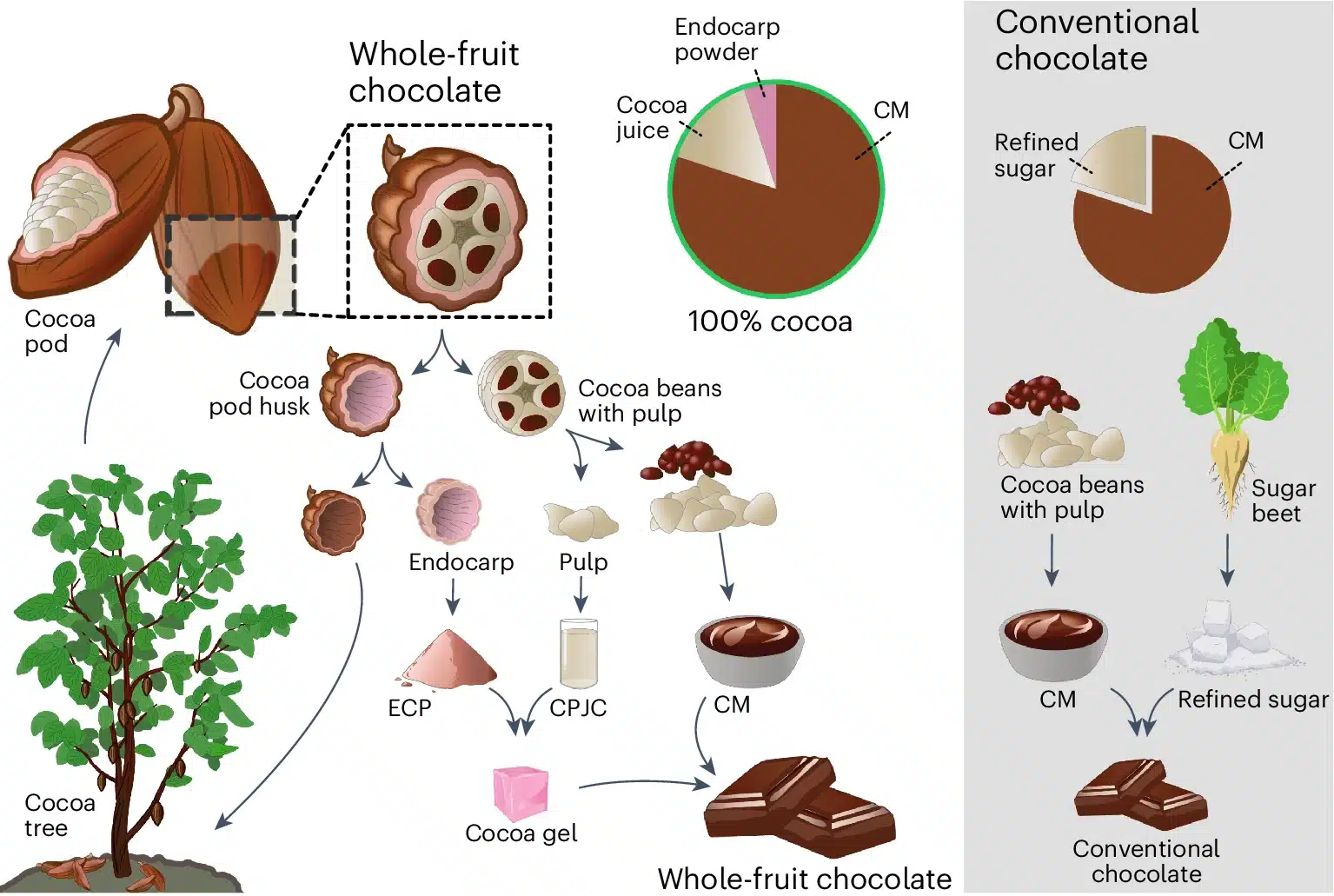
Технологи нашли способ сделать шоколад полезнее В основе «традиционного» шоколада какао-бобы и какао-масло. Если использовать весь плод какао (какао-фрукт), то десерт станет полезнее для человеческого организма, а отходов от его производства будет меньше. Плод какао по структуре напоминает дыню. Под твердой кожурой находится мякоть, которая окружает семена (какао-бобы). Для производства шоколада используются только какао-бобы, а все остальные части плода не нужны. Исследователи из Швейцарской высшей технической школы Цюриха совместно со швейцарской шоколадной фабрикой Max Felchlin AG разработали рецепт какао-фруктового шоколада, в котором, помимо бобов, используется мякоть плода и внутренняя часть его кожуры. Результаты эксперимента опубликовал журнал Nature Food. Авторы работы превратили внутреннюю часть кожуры в порошок и смешали с мякотью. Получился какао-гель — очень сладкое желеобразное вещество, которое позволило не добавлять в шоколад сахарную пудру. Идеальное соотношение ингредиентов, при котором шоколад был достаточно сладким и имел правильную текстуру, определили опытным путем. Оказалось, что примерно 20% какао-геля по сладости эквивалентны 5-10% сахарной пудры (в обычном темном шоколаде 30-40% пудры). Слишком большое количество сока, выделявшегося из мякоти, сделало шоколад комковатым, а когда его было мало, десерт получился горьким. Выявить правильные пропорции ингредиентов помогли эксперты из Бернского университета прикладных наук в Швейцарии. Они попробовали по пять граммов «традиционного» шоколада с разным содержанием сахарной пудры и какао-фруктового, а затем оценили степень сладости разных видов десерта. По сравнению с темным шоколадом по классическому европейскому рецепту какао-фруктовый содержит почти на 20% больше клетчатки, необходимой для нормальной работы кишечника и регулирования уровня сахара в крови. Кроме того, в нем примерно на 30% меньше насыщенных жиров, которые при избыточном употреблении вредят организму, например повышают риск сердечно-сосудистых заболеваний. Важно и то, что использование плода какао делает производство шоколада более экологичным и экономически выгодным. Фермеры смогут разнообразить ассортимент, снизить количество отходов и увеличить заработок, если начнут использовать не только бобы, а практически весь какао-фрукт. У людей, которые выращивают какао, появится возможность продавать производителям шоколада компоненты для какао-геля. Хотя какао-фруктовый шоколад удобен для производства, превосходит по пользе «традиционный» и не отличается от него по вкусу, на прилавках он в ближайшее время не появится, отметили исследователи. По их словам, перед промышленным изготовлением нужно, как минимум, обеспечить производителей оборудованием для сушки кожуры и запастись достаточным количеством порошка для какао-геля.
-
aGyV6W0_460svav1[1].mp4
-
$400 000 100kg-200kg-300kg-Human-Flying-Four-Passenger-Drone-Taxi-Motors-And-Software-Personally-Vtol-Transport--Buy-Drone-TaxiPassenger-DronePassenger-Drone-Motors-Product-on-Alibaba.com (1).mp45000$ на алибабе Big-Fixed-Wing-Professionnel-Window-Cleaning-Agriculture-Drone-Light-Show-Long-Range-Delivery-Payload-Drone-Sprayer--Buy-Fixed-Wing-Drone-Professionnel-Drone-Light-Show-Payload-Drone-Professional-DroneHeavy-Lift-Agricult (2).mp4Появились слухи о DJI AIR3S! В прошлом месяце ходили слухи о том, что 3-линзовый DJI AIR 3S уже готов. Пользователи сети сразу же предоставили шпионские фотографии, чтобы поделиться ими со всеми. Усиленная батарея:


 Состояние перехода у Института Зерна
Состояние перехода у Института Зерна Дрон снимает самолет в действии Короткометражный фильм "26 000 дней", снятый с помощью FPV-дрона, демонстрирует захватывающие кадры полета пилота-каскадера Эрика Такера на его Piper J3 Cub. Такер известен своими трюками с выключенным двигателем, когда он намеренно глушит мотор и выполняет фигуры высшего пилотажа, планируя к земле. Съемка самолетов всегда была сложной задачей из-за их высокой скорости и нахождения в воздухе, но маневренность FPV-дрона открывает новые возможности. Пилот БПЛА Алекс Вановер, чемпион Drone Racing League и оператор, работавший с Майклом Бэем и Джастином Бибером, мастерски запечатлел полет Такера. Звукорежиссер Марк Кэмперелл также проделал впечатляющую работу: момент, когда Такер выключает двигатель, оставляя зрителя наедине с ветром и скрипом планера, заставляет сердце замирать. FPV Drone X Piper Cub ( 26,000 Days ).mp4К этой новости более понятно Новая технология позволит создавать умных летающих роботов размером с насекомое Исследователи Делфтского технологического университета разработали нейроморфный механизм управления зрением, который делает возможными автономные полеты дронов. Для этого проекта команда создала пятислойную нейросеть из 28 800 нейронов. Сеть обрабатывает «сырые» данные с камеры, на их основе оценивает трехмерное движение в окружающей среде и выдает команды управления для дрона. Во время полета нейроморфный дрон обрабатывал данные до 64 раз быстрее, чем графическая карта, и потреблял всего 7 милливатт энергии на работу нейросети. Развитие этой технологии позволит дронам стать такими же маленькими, маневренными и умными, как летающие насекомые. Искусственный интеллект обладает огромным потенциалом для предоставления автономным роботам интеллекта, необходимого для реальных приложений. Однако нынешний ИИ опирается на глубокие нейронные сети, требующие значительной вычислительной мощности. Графические процессоры, предназначенные для работы глубоких нейронных сетей потребляют много энергии. Это особенно проблематично для небольших роботов, таких как летающие дроны, поскольку у них ограничены ресурсы с точки зрения датчиков и вычислений. Мозг животных анализируют информацию совсем не так, как нейронные сети, работающие на графических процессорах. Биологические нейроны обрабатывают данные асинхронно (неодновременно) и в основном общаются с помощью электрических импульсов, называемых спайками. Поскольку передача таких спайков требует энергии, мозг минимизирует их количество, что приводит к разреженной обработке информации (где используется лишь малая часть нейронов). Вдохновленные этими свойствами мозга животных, ученые и технологические компании разрабатывают нейроморфные процессоры. Эти процессоры позволяют запускать импульсные нейронные сети и обещают быть намного быстрее и энергоэффективнее. Теперь ученые впервые продемонстрировали дрон, использующий нейроморфное зрение и управление для автономного полета. В частности, они разработали спайковую нейронную сеть, которая обрабатывает сигналы с нейроморфной камеры и выдает команды управления, определяющие положение и тягу дрона. Эту сеть ученые развернули на борту дрона на базе нейроморфного исследовательского чипа Intel Loihi. Благодаря данной сети дрон может воспринимать и контролировать собственное движение во всех направлениях с частотой около 200 Гц. Эта система автономно следовала заданным точкам движения без внешней помощи. Схема аппаратной установки включает камеру событий, нейроморфный процессор, одноплатный компьютер и контроллер полета. Дрон весом 994 г и диаметром 35 см продемонстрировал плавное снижение высоты во время экспериментов по посадке. Система обучения сети состоит из двух модулей. Первый обучается визуально воспринимать движение по сигналам движущейся нейроморфной камеры. Это похоже на то, как животные учатся воспринимать мир самостоятельно. Второй учится отображать предполагаемое движение в соответствии с командами управления в симуляторе. Обучение системы управления дроном происходило с помощью искусственной эволюции в симуляторе. Сети, которые лучше управляли беспилотником, имели больше шансов на «размножение». По мере смены поколений искусственной эволюции спайковые нейронные сети становились все эффективнее в управлении и, наконец, смогли летать в любом направлении на разных скоростях. Одной из главных проблем обучения дронов с автономным управлением является «разрыв реальности» — системы, натренированные на идеальных моделях среды, зачастую не справляются с реальным миром. Исследователи нашли способ обойти эту проблему. Обучение нейроморфного зрения происходит на «сырых» данных с камеры, что позволяет дрону «видеть» реальный мир. Команда также использовала метод самообучения, избавляющий от необходимости в сложных наземных измерениях. Кроме того, не нужно создавать высокочастотные и реалистичные изображения для обучения, что сокращает время тренировки нейронной сети. Разработанная сеть работает на частоте от 274 до 1600 раз в секунду. При этом, если запустить ту же сеть на небольшом встроенном графическом процессоре (GPU), она сможет работать только 25 раз в секунду — разница в 10-64 раз. Более того, исследовательский нейроморфный чип Intel Loihi потребляет всего 1,007 Вт, из которых 1 Вт приходится на включение чипа. Сама работа сети потребляет лишь 7 милливатт. Для сравнения, встроенный GPU при выполнении той же задачи потребляет 3 Вт, из которых 1 Вт — включение, а 2 Вт — непосредственно работа сети.На полках российских магазинов нашли пельмени из бобра
Дрон снимает самолет в действии Короткометражный фильм "26 000 дней", снятый с помощью FPV-дрона, демонстрирует захватывающие кадры полета пилота-каскадера Эрика Такера на его Piper J3 Cub. Такер известен своими трюками с выключенным двигателем, когда он намеренно глушит мотор и выполняет фигуры высшего пилотажа, планируя к земле. Съемка самолетов всегда была сложной задачей из-за их высокой скорости и нахождения в воздухе, но маневренность FPV-дрона открывает новые возможности. Пилот БПЛА Алекс Вановер, чемпион Drone Racing League и оператор, работавший с Майклом Бэем и Джастином Бибером, мастерски запечатлел полет Такера. Звукорежиссер Марк Кэмперелл также проделал впечатляющую работу: момент, когда Такер выключает двигатель, оставляя зрителя наедине с ветром и скрипом планера, заставляет сердце замирать. FPV Drone X Piper Cub ( 26,000 Days ).mp4К этой новости более понятно Новая технология позволит создавать умных летающих роботов размером с насекомое Исследователи Делфтского технологического университета разработали нейроморфный механизм управления зрением, который делает возможными автономные полеты дронов. Для этого проекта команда создала пятислойную нейросеть из 28 800 нейронов. Сеть обрабатывает «сырые» данные с камеры, на их основе оценивает трехмерное движение в окружающей среде и выдает команды управления для дрона. Во время полета нейроморфный дрон обрабатывал данные до 64 раз быстрее, чем графическая карта, и потреблял всего 7 милливатт энергии на работу нейросети. Развитие этой технологии позволит дронам стать такими же маленькими, маневренными и умными, как летающие насекомые. Искусственный интеллект обладает огромным потенциалом для предоставления автономным роботам интеллекта, необходимого для реальных приложений. Однако нынешний ИИ опирается на глубокие нейронные сети, требующие значительной вычислительной мощности. Графические процессоры, предназначенные для работы глубоких нейронных сетей потребляют много энергии. Это особенно проблематично для небольших роботов, таких как летающие дроны, поскольку у них ограничены ресурсы с точки зрения датчиков и вычислений. Мозг животных анализируют информацию совсем не так, как нейронные сети, работающие на графических процессорах. Биологические нейроны обрабатывают данные асинхронно (неодновременно) и в основном общаются с помощью электрических импульсов, называемых спайками. Поскольку передача таких спайков требует энергии, мозг минимизирует их количество, что приводит к разреженной обработке информации (где используется лишь малая часть нейронов). Вдохновленные этими свойствами мозга животных, ученые и технологические компании разрабатывают нейроморфные процессоры. Эти процессоры позволяют запускать импульсные нейронные сети и обещают быть намного быстрее и энергоэффективнее. Теперь ученые впервые продемонстрировали дрон, использующий нейроморфное зрение и управление для автономного полета. В частности, они разработали спайковую нейронную сеть, которая обрабатывает сигналы с нейроморфной камеры и выдает команды управления, определяющие положение и тягу дрона. Эту сеть ученые развернули на борту дрона на базе нейроморфного исследовательского чипа Intel Loihi. Благодаря данной сети дрон может воспринимать и контролировать собственное движение во всех направлениях с частотой около 200 Гц. Эта система автономно следовала заданным точкам движения без внешней помощи. Схема аппаратной установки включает камеру событий, нейроморфный процессор, одноплатный компьютер и контроллер полета. Дрон весом 994 г и диаметром 35 см продемонстрировал плавное снижение высоты во время экспериментов по посадке. Система обучения сети состоит из двух модулей. Первый обучается визуально воспринимать движение по сигналам движущейся нейроморфной камеры. Это похоже на то, как животные учатся воспринимать мир самостоятельно. Второй учится отображать предполагаемое движение в соответствии с командами управления в симуляторе. Обучение системы управления дроном происходило с помощью искусственной эволюции в симуляторе. Сети, которые лучше управляли беспилотником, имели больше шансов на «размножение». По мере смены поколений искусственной эволюции спайковые нейронные сети становились все эффективнее в управлении и, наконец, смогли летать в любом направлении на разных скоростях. Одной из главных проблем обучения дронов с автономным управлением является «разрыв реальности» — системы, натренированные на идеальных моделях среды, зачастую не справляются с реальным миром. Исследователи нашли способ обойти эту проблему. Обучение нейроморфного зрения происходит на «сырых» данных с камеры, что позволяет дрону «видеть» реальный мир. Команда также использовала метод самообучения, избавляющий от необходимости в сложных наземных измерениях. Кроме того, не нужно создавать высокочастотные и реалистичные изображения для обучения, что сокращает время тренировки нейронной сети. Разработанная сеть работает на частоте от 274 до 1600 раз в секунду. При этом, если запустить ту же сеть на небольшом встроенном графическом процессоре (GPU), она сможет работать только 25 раз в секунду — разница в 10-64 раз. Более того, исследовательский нейроморфный чип Intel Loihi потребляет всего 1,007 Вт, из которых 1 Вт приходится на включение чипа. Сама работа сети потребляет лишь 7 милливатт. Для сравнения, встроенный GPU при выполнении той же задачи потребляет 3 Вт, из которых 1 Вт — включение, а 2 Вт — непосредственно работа сети.На полках российских магазинов нашли пельмени из бобра C100 – квадрокоптер, который предназначен для логистики и разведки от американской компании Performance Drone Works (PDW) IMG_4193.MP4 Дрон способен складываться в рюкзак и может быть развернут менее чем за 2 минуты. Оснащен разными вариантами полезной нагрузки . Также имеется на борту камера для просмотра от первого лица(FPV) и связь стандарта AES-256. Время полёта: 74 мин Скорость: 64 км/ч Полезная нагрузка: до 4,5 кгПолное нейроморфное зрение и контроль для автономного полета дрона Мозг животных использует меньше данных и энергии, чем нынешние глубокие нейронные сети, работающие на графических процессорах (GPU). Это затрудняет разработку микроавтономных дронов, поскольку они слишком малы и легки для тяжелого оборудования и больших батарей. Недавно появление нейроморфных процессоров, имитирующих функции мозга, позволило исследователям Делфтского технического университета разработать дрон, который использует нейроморфное зрение и управление для автономного полета. Результаты были очень многообещающими: во время полета глубокая нейронная сеть дрона обрабатывала данные в 64 раза быстрее и потребляла в три раза меньше энергии, чем при работе на графическом процессоре. Дальнейшие разработки в этой технологии могут позволить дронам быть такими же маленькими, маневренными и умными, как летающие насекомые или птицы. Биосенсоры и обработка являются асинхронными и разреженными, что приводит к малой задержке и энергоэффективному восприятию и действию. Ожидается, что в робототехнике нейроморфное оборудование для зрительного восприятия событий и импульсных нейронных сетей будет иметь схожие характеристики. Однако из-за ограниченного размера сети современных встроенных нейроморфных процессоров и сложности обучения импульсных нейронных сетей роботизированные реализации ограничены базовыми задачами с низкоразмерным сенсорным вводом и двигательными действиями. Здесь мы предлагаем полностью нейроморфный конвейер визуального контроля для управления летающими дронами. В частности, мы обучаем импульсную нейронную сеть, которая принимает необработанные данные камеры на основе событий и выводит низкоуровневые управляющие действия для выполнения автономного полета на основе зрения. Зрительная часть сети, состоящая из пяти слоев и 28 800 нейронов, сопоставляет входящие необработанные события с оценками собственного движения и обучается посредством самостоятельного обучения на данных о реальных событиях. Часть управления состоит из одного уровня декодирования и обучается с помощью эволюционного алгоритма в симуляторе дрона. Обзор предлагаемой системы. (A) Квадрокоптер, использованный в этой работе (общий вес 1,0 кг, размер 35 см). (B) Обзор оборудования, показывающий связь между камерой событий, нейроморфным процессором, одноплатным компьютером и контроллером полета. (C) Обзор конвейера, показывающий события как входные данные, обрабатываемые визуальной сетью и декодированные в команды управления. (D) Демонстрация системы посадки с оптическим расхождением потока Роботизированные эксперименты показывают, что полностью изученный нейроморфный конвейер успешно переходит от симуляции к реальности. Дрон может точно контролировать свое движение, позволяя зависать, приземляться и маневрировать вбок — даже во время рыскания. Нейроморфный конвейер работает на нейроморфном процессоре Intel Loihi, работает на частоте 200 Гц, потребляет 0,94 Вт в режиме ожидания и потребляет всего лишь от 7 до 12 милливатт дополнительно при работе сети. Эти результаты иллюстрируют потенциал нейроморфного восприятия и обработки данных для создания интеллектуальных роботов размером с насекомое.
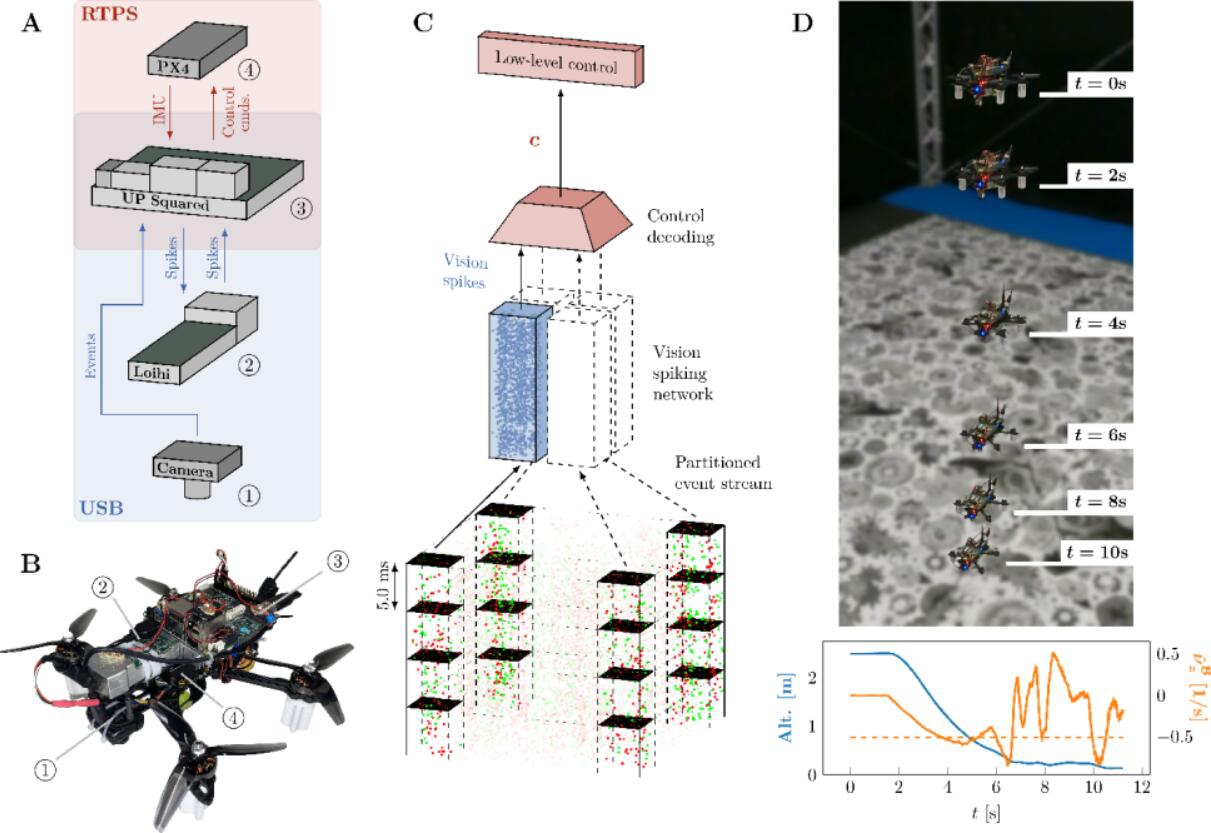
C100 – квадрокоптер, который предназначен для логистики и разведки от американской компании Performance Drone Works (PDW) IMG_4193.MP4 Дрон способен складываться в рюкзак и может быть развернут менее чем за 2 минуты. Оснащен разными вариантами полезной нагрузки . Также имеется на борту камера для просмотра от первого лица(FPV) и связь стандарта AES-256. Время полёта: 74 мин Скорость: 64 км/ч Полезная нагрузка: до 4,5 кгПолное нейроморфное зрение и контроль для автономного полета дрона Мозг животных использует меньше данных и энергии, чем нынешние глубокие нейронные сети, работающие на графических процессорах (GPU). Это затрудняет разработку микроавтономных дронов, поскольку они слишком малы и легки для тяжелого оборудования и больших батарей. Недавно появление нейроморфных процессоров, имитирующих функции мозга, позволило исследователям Делфтского технического университета разработать дрон, который использует нейроморфное зрение и управление для автономного полета. Результаты были очень многообещающими: во время полета глубокая нейронная сеть дрона обрабатывала данные в 64 раза быстрее и потребляла в три раза меньше энергии, чем при работе на графическом процессоре. Дальнейшие разработки в этой технологии могут позволить дронам быть такими же маленькими, маневренными и умными, как летающие насекомые или птицы. Биосенсоры и обработка являются асинхронными и разреженными, что приводит к малой задержке и энергоэффективному восприятию и действию. Ожидается, что в робототехнике нейроморфное оборудование для зрительного восприятия событий и импульсных нейронных сетей будет иметь схожие характеристики. Однако из-за ограниченного размера сети современных встроенных нейроморфных процессоров и сложности обучения импульсных нейронных сетей роботизированные реализации ограничены базовыми задачами с низкоразмерным сенсорным вводом и двигательными действиями. Здесь мы предлагаем полностью нейроморфный конвейер визуального контроля для управления летающими дронами. В частности, мы обучаем импульсную нейронную сеть, которая принимает необработанные данные камеры на основе событий и выводит низкоуровневые управляющие действия для выполнения автономного полета на основе зрения. Зрительная часть сети, состоящая из пяти слоев и 28 800 нейронов, сопоставляет входящие необработанные события с оценками собственного движения и обучается посредством самостоятельного обучения на данных о реальных событиях. Часть управления состоит из одного уровня декодирования и обучается с помощью эволюционного алгоритма в симуляторе дрона. Обзор предлагаемой системы. (A) Квадрокоптер, использованный в этой работе (общий вес 1,0 кг, размер 35 см). (B) Обзор оборудования, показывающий связь между камерой событий, нейроморфным процессором, одноплатным компьютером и контроллером полета. (C) Обзор конвейера, показывающий события как входные данные, обрабатываемые визуальной сетью и декодированные в команды управления. (D) Демонстрация системы посадки с оптическим расхождением потока Роботизированные эксперименты показывают, что полностью изученный нейроморфный конвейер успешно переходит от симуляции к реальности. Дрон может точно контролировать свое движение, позволяя зависать, приземляться и маневрировать вбок — даже во время рыскания. Нейроморфный конвейер работает на нейроморфном процессоре Intel Loihi, работает на частоте 200 Гц, потребляет 0,94 Вт в режиме ожидания и потребляет всего лишь от 7 до 12 милливатт дополнительно при работе сети. Эти результаты иллюстрируют потенциал нейроморфного восприятия и обработки данных для создания интеллектуальных роботов размером с насекомое.
 Про запреты полетов на дронах, пояснение. На миниках до 250гр летать можно! Если нет запрета субъекта и не выделена специальная зона: 1) В населённом пункте можно летать без разрешения только на дронах до 0,25кг. На дронах от 0,25 кг нужно получать разрешение (на практике получать его от 11 до 30 дней). 2) За пределами населённых пунктов можно летать без разрешения на использование воздушного пространства (ИВП) на дронах до 30 кг на высоте до 150 м в прямой видимости при условии отсутствия запретных зон / зон ограничений и до 100м на удалении 10 км от контрольных точек аэродромов / 2 км от посадочных площадок (это упрощённый порядок, он в новой редакции немного изменился). 3) Если есть запретные зоны / зоны ограничений или не с соблюдается удаление до точек аэродромов / площадок, то упрощённый порядок не применяется и нужно получать разрешение на ИВП (на практике от 3 до 6 дней) для полётов за пределами населённых пунктов. Если нет запрета субъекта и выделена специальная зона в населённом пункте: 1) Без получения разрешения в населённом пункте в границах специальной зоны можно летать на дронах до 30 кг на высоте до 150 м в прямой видимости. Вот про это писали СМИ, ошибочно указав про полёты во всех населённых пунктах без разрешений. При этом в населённом пункте за границами специальной зоны действует тот же самый порядок - получить разрешение (до 30 дней) для дронов от 0,25 кг. 2) Упрощённый порядок за пределами населённых пунктов и запретных зон применяется на тех же условиях. 3) Необходимо получать разрешения на ИВП (от 3 до 6 дней) за границами населённых пунктов там, где не применяется упрощённый порядок. Если есть запрет субъекта и выделена специальная зона: 1) Предположительно* в границах этой зоны в населённом пункте можно летать без разрешений до 150 м высоты. *Зависит от условий установления этой зоны, могут и не разрешить в ней летать при наличии запрета субъекта. За границами зоны в населённом пункте летать нельзя. 2) Упрощённый порядок отсутствует в принципе в условиях запрета. 3)Не выдаются разрешения на ИВП (от 3 до 6 дней) за границами населённых пунктов там, где не применяется упрощённый порядок. Такая ситуация по общему правилу. При этом у запретов субъектов есть свои особенности. Например - Московская область, где разрешение можно получить за пределами населённых пунктов. Или Тверская область, где просто обязывают получить разрешение.Летишь такой на свадебном дроне, снимаешь, а у тут бешенный неборейсер на фпв IMG_4180.MP4
Про запреты полетов на дронах, пояснение. На миниках до 250гр летать можно! Если нет запрета субъекта и не выделена специальная зона: 1) В населённом пункте можно летать без разрешения только на дронах до 0,25кг. На дронах от 0,25 кг нужно получать разрешение (на практике получать его от 11 до 30 дней). 2) За пределами населённых пунктов можно летать без разрешения на использование воздушного пространства (ИВП) на дронах до 30 кг на высоте до 150 м в прямой видимости при условии отсутствия запретных зон / зон ограничений и до 100м на удалении 10 км от контрольных точек аэродромов / 2 км от посадочных площадок (это упрощённый порядок, он в новой редакции немного изменился). 3) Если есть запретные зоны / зоны ограничений или не с соблюдается удаление до точек аэродромов / площадок, то упрощённый порядок не применяется и нужно получать разрешение на ИВП (на практике от 3 до 6 дней) для полётов за пределами населённых пунктов. Если нет запрета субъекта и выделена специальная зона в населённом пункте: 1) Без получения разрешения в населённом пункте в границах специальной зоны можно летать на дронах до 30 кг на высоте до 150 м в прямой видимости. Вот про это писали СМИ, ошибочно указав про полёты во всех населённых пунктах без разрешений. При этом в населённом пункте за границами специальной зоны действует тот же самый порядок - получить разрешение (до 30 дней) для дронов от 0,25 кг. 2) Упрощённый порядок за пределами населённых пунктов и запретных зон применяется на тех же условиях. 3) Необходимо получать разрешения на ИВП (от 3 до 6 дней) за границами населённых пунктов там, где не применяется упрощённый порядок. Если есть запрет субъекта и выделена специальная зона: 1) Предположительно* в границах этой зоны в населённом пункте можно летать без разрешений до 150 м высоты. *Зависит от условий установления этой зоны, могут и не разрешить в ней летать при наличии запрета субъекта. За границами зоны в населённом пункте летать нельзя. 2) Упрощённый порядок отсутствует в принципе в условиях запрета. 3)Не выдаются разрешения на ИВП (от 3 до 6 дней) за границами населённых пунктов там, где не применяется упрощённый порядок. Такая ситуация по общему правилу. При этом у запретов субъектов есть свои особенности. Например - Московская область, где разрешение можно получить за пределами населённых пунктов. Или Тверская область, где просто обязывают получить разрешение.Летишь такой на свадебном дроне, снимаешь, а у тут бешенный неборейсер на фпв IMG_4180.MP4












Аккаунт
Навигация
Поиск
Configure browser push notifications
Chrome (Android)
- Tap the lock icon next to the address bar.
- Tap Permissions → Notifications.
- Adjust your preference.
Chrome (Desktop)
- Click the padlock icon in the address bar.
- Select Site settings.
- Find Notifications and adjust your preference.
Safari (iOS 16.4+)
- Ensure the site is installed via Add to Home Screen.
- Open Settings App → Notifications.
- Find your app name and adjust your preference.
Safari (macOS)
- Go to Safari → Preferences.
- Click the Websites tab.
- Select Notifications in the sidebar.
- Find this website and adjust your preference.
Edge (Android)
- Tap the lock icon next to the address bar.
- Tap Permissions.
- Find Notifications and adjust your preference.
Edge (Desktop)
- Click the padlock icon in the address bar.
- Click Permissions for this site.
- Find Notifications and adjust your preference.
Firefox (Android)
- Go to Settings → Site permissions.
- Tap Notifications.
- Find this site in the list and adjust your preference.
Firefox (Desktop)
- Open Firefox Settings.
- Search for Notifications.
- Find this site in the list and adjust your preference.