


Flanger
Администратор
-
Зарегистрирован
Весь контент Flanger
-
Китайские СМИ утверждают, что НОАК массово производит разведывательные БЛА для использования в приграничных районах, и отмечают, что эти они могут сбрасывать 82-мм минометные мины на позиции противника. IMG_3765.MP4 дрон_edit.mp4
-
-
В Нидерландах предложили уничтожать насекомых-вредителей в теплицах с помощью мини-дронов, инфракрасных камер и ИИ Инженеры учреждённой при Вагенингенском университете (Нидерланды) компании PATS построили одноимённую систему, предназначенную для борьбы с насекомыми в теплицах. Вредители обнаруживаются инфракрасными камерами и ликвидируются миниатюрными дронами. Система PATS включает в себя компоненты PATS-C и PATS-X. Компонент PATS-C составляет набор подключённых к интернету инфракрасных камер, которые устанавливаются по всей теплице. Изображение с камер обрабатывает алгоритм на основе искусственного интеллекта, который обнаруживает насекомых, пересекающих воздушное пространство над растениями. Далее на основании данных о размере насекомого и частоте взмахов его крыльев производится идентификация объекта. Если это представитель полезного вида, например, пчела, система на него не реагирует. В противном случае в дело вступает PATS-X. PATS-X представляет собой один или несколько миниатюрных дронов, которые базируются на площадке с беспроводной зарядкой. При обнаружении вредителя PATS-C активирует дрон и отправляет его к местоположению вредителя — машина просто таранит его, перерубая своими винтами, и возвращается на «аэродром». Базовая версия PATS-C уже используется на 250 объектах по всей Европе — пока она просто информирует клиентов о появлении насекомых. PATS-X проходит испытания, а поставки ожидаются уже в этом году. Выяснилось, что при полете двигатели дронов издают ультразвук в том же диапазоне, что и летучие мыши. Из-за этого некоторые мотыльки-вредители пытаются уклониться от PATS-X. С одной стороны, авторы проекта решили это учесть при разработке навигационного алгоритма. С другой, возникла идея установить в теплицах динамики, которые воспроизводят эти звуки и отпугивают насекомых.


-
Оригинальная просочившаяся фотография DJI Mini4pro. Это не похоже на прототип, обклеенный наклейками, как другие утечки фотографий, а на готовый продукт. На данный момент мы можем только догадываться о дате релиза.

-
"По словам Джаспера Элленса утечка из DJI показывает, что, DJI Air 3 может включать в себя модернизированное зарядное устройство как часть комплекта Fly More Combo. Это улучшенное зарядное устройство позволит одновременно заряжать несколько аккумуляторов. Это значительное улучшение. Элленс также утверждает, что Air 3 будет оснащен совершенно новой системой передачи O4, что, вероятно, объясняет введение новых контроллеров вместе с дроном. Если этот слух верен, мы можем ожидать более высокий битрейт, меньшую задержку и расширенный диапазон для Air 3." И фотка камер DJI Air3

-
Видео от Медвежий фарш EVIL and LIFE.mp4
-
"Колмна (с 1924 г. Новая Колмна) в Каширском уезде" 01. Мать Фёдора Солодухина 02. Фёдор Алексеевич Солодухин 03. Жена Ф.А.Солодухина 04. Ребенок Ф.А.Солодухина 05. Жена и дети Ф.А. Солодухина 06. «Шестилетний работник». Ребенок Ф.А. Солодухина 07. Изба Федора Алексеевича Солодухина. Общий вид 08. Изба Федора Алексеевича Солодухина. Крыльцо 09. Изба Федора Алексеевича Солодухина. Крыша 10. Изба Федора Алексеевича Солодухина. Окно 11. Изба Федора Алексеевича Солодухина. В сенях 12. Изба Федора Алексеевича Солодухина. В сеняъ.jpg 13. Изба Федора Алексеевича Солодухина 14. Внутри избы Ф.А. Солодухина 15. Внутри избы Ф.А. Солодухина 16. Внутри избы Ф.А. Солодухина.jpg 17. Внутри избы Ф.А. Солодухина.jpg 18. Крытый двор Ф.А. Солодухина. Вид снаружи 19. Крытый двор Ф.А. Солодухина. Застреха 20. Крытый двор Ф.А. Солодухина. Форма двора «покоем». 21. Крытый двор Ф.А. Солодухина 22. Тихон Васильевич Солодухин 23. Жена Т.В. Солодухина 23. Семья Т.В. Солодухина 24. Члены семьи семьи Т.В. Солодухина. Портрет 25. Члены семьи семьи Т.В. Солодухина. Работа со швейной машинкой 26. Члены семьи семьи Т.В. Солодухина. Портрет 27. Члены семьи семьи Т.В. Солодухина. Рубка хвороста 28. Дом Т.В. Солодухина 29. Дом Т.В. Солодухина. У печки 30. Дом Т.В. Солодухина. Зеркало на стене 31. Дом Т.В. Солодухина. В избе 32. Дом Т.В. Солодухина. Детская кроватка 33. Дом Т.В. Солодухина. Лыковая ручка (из соседнего дома) 34. Дом Т.В. Солодухина. Деревянные крюки для подвешивания из естественных форм дерева (из соседнего дома) 35. Крытый двор Т.В. Солодухина 36. Семья Н.В.Суркова. Николай Васильевич Сурков 37. Семья Н.В.Суркова. Жена Н.В. Суркова 38. Н. В. Сурков. На лежанке его дети 39. Дочь Н.В.Суркова 40. Михаил Николаевич Сурков. В колхозе с его основания 41. Семья Н.В.Суркова 42. С молоком 43. Дом Н.В.Суркова 44. 45. 46. 47. 48. 49. 50. Общественный сектор. Корова Рига с коровами Лежащие коровы Дойка коров Корова Сено для коров Обобществленный сектор. Здание коровника Обобществленный сектор. Здание коровника Обобществленный сектор. Погрузка досок Обобществленный сектор. Кирпичный дом Заготовка семян. Мешки с зерном Пломбирование зернохранилища Обобществленный конный двор. Помещение конюхов Утиль сырья. Ветошь Утиль сырья. Кожа Утиль сырья. Стекло Утиль сырья Новая часть деревни Новая Колмна Жилище и двор Б.П. Бакатуева. Дом Жилище и двор Б.П. Бакатуева Жилище и двор Б.П. Бакатуева. Выход во двор Жилище и двор Б.П. Бакатуева. Остатки двора Жилище и двор Б.П. Бакатуева. Омшенник Жилище и двор Б.П. Бакатуева. Дверь омшенника Семья и жилище Б.П.Бакатуева. Тулуп и пальто у печки Семья и жилище Б.П.Бакатуева. Бабушка Семья и жилище Б.П.Бакатуева. Бабушка с внуком на печке Семья и жилище Б.П.Бакатуева. Комсомолка Семья и жилище Б.П.Бакатуева. Стирка белья Семья и жилище Б.П.Бакатуева. Утренний чай Разработка известняка для удобрения Разработка известняка. Каменотес за работой Разработка известняка. Каменотес с молотом и грудой камней Разработка известняка. Нога каменотеса в обмотках Разработка известняка. Каменотес Разработка известняка. Портрет мальчика помощника на фоне груды камней Гора известковой муки Сани у горы известковой муки Разработка известняка для удобрения. Возчик Погрузка известковой муки для удобрения Разработка известняка. Погрузка известняка в тачку Разработка известняка для удобрения. Сани, груженые известняком Изба председателя колхоза И.П. Кирьянова Мать председателя колхоза И.П. Кирьянова Дети председателя колхоза И.П. Кирьянова Семья председателя колхоза И.П. Кирьянова Групповой портрет деревенских детей Заготовка семян. Неизвестный крестьянин с мешком зерна Заготовка семян. Неизвестный крестьянин укладывает мешки с зерном на телегу Заготовка семян. Портрет неизвестного крестьянина Конный двор Обобществленный конный двор. Председатель артели возчиков Обобществленный конный двор. Внутренний вид. Конюх поит коня Обобществленный конный двор. Внутренний вид. Кормушка Обобществленный конный двор. Внутренний вид. Метла Обобществленный конный двор. Внутренний вид. Вилы у стены Улица старой части деревни Новая Колмна Деревенский дом Типы построек. Укрытия и утепления Фруктовый сад зимой Мост у деревни Новая Колмна Ряд амбаров вдоль берега замёрзшей реки Будущая общественная столовая Бочка с водой для пойла коров Улица новой части деревни Новая Колмна
-
«Kunst und Artillerie Buch» — рукопись 1622 года, приписываемая Гансу Георгу Ширватту и, возможно, изготовленная в Праге. Это иллюстрируется приспособлениями, предназначенными для убийства людей на войне, часто самыми причудливыми и болезненными способами. Помимо мушкетов и приспособлений для рукопашного боя, оружие, доступное в 17 веке, включало гранаты, наполненные шрапнелью, бомбы наполненные шипами и бомбы с пчелами. О таком оружии американская полиция в 19 веке могла только мечтать. Некоторые из них, возможно, использовались во время Тридцатилетней войны (1618–1648).Point Blank Weapon System — это электронно-оптическая ракета VTOL (Vertical Takeoff & Landing), запускаемая вручную, которая дает войскам новые возможности атаки и маневрирования.
 eVTOL оснащен шестью электрическими винтами и электродвигателями, установленными на складных крыльях. При движении по автомагистралям, они убраны и не мешают другому транспорту, но в случае необходимости быстро раскладываются «одним нажатием кнопки». Каждый несущий винт имеет независимый аккумуляторный источник питания от литий-ионных батареек, а также двигатель, увеличивающий запас хода, который заряжает аккумуляторы в полете и во время движения. Для работы этого дополнительного двигателя используется бензин премиум-класса, которым eVTOL можно заправить на любой АЗС. Кроме того, летающий автомобиль оснащен двумя задними вертикальными стабилизаторами для аэродинамического контроля и большими панорамными окнами для пассажиров. Получение специального сертификата летной годности для проведения испытаний предсерийной модели (одного самолета), говорит, что компания вышла на финишную прямую. В случае успеха, эти «летающие машины» будут запущены в серийное производство и выйдут на дорогу. Предварительно объявленная стоимость такого eVTOL составляет $789 000.Блюдо называется Godzilla Ramen. Оно готовится на рыбном бульоне, сюда добавляются 40 различных специй и, конечно, тушеная крокодиловая ляжка, торчащая из тарелки. Порция стоит 1500 тайваньских долларов (примерно 4200 рублей).
eVTOL оснащен шестью электрическими винтами и электродвигателями, установленными на складных крыльях. При движении по автомагистралям, они убраны и не мешают другому транспорту, но в случае необходимости быстро раскладываются «одним нажатием кнопки». Каждый несущий винт имеет независимый аккумуляторный источник питания от литий-ионных батареек, а также двигатель, увеличивающий запас хода, который заряжает аккумуляторы в полете и во время движения. Для работы этого дополнительного двигателя используется бензин премиум-класса, которым eVTOL можно заправить на любой АЗС. Кроме того, летающий автомобиль оснащен двумя задними вертикальными стабилизаторами для аэродинамического контроля и большими панорамными окнами для пассажиров. Получение специального сертификата летной годности для проведения испытаний предсерийной модели (одного самолета), говорит, что компания вышла на финишную прямую. В случае успеха, эти «летающие машины» будут запущены в серийное производство и выйдут на дорогу. Предварительно объявленная стоимость такого eVTOL составляет $789 000.Блюдо называется Godzilla Ramen. Оно готовится на рыбном бульоне, сюда добавляются 40 различных специй и, конечно, тушеная крокодиловая ляжка, торчащая из тарелки. Порция стоит 1500 тайваньских долларов (примерно 4200 рублей). Стартап придумал, как вырастить трансгенную сою, которая заменит свинину Стартап Moolec разработал уникальную и патентоспособную платформу для экспрессии высокоценных белков в семенах экономически важных культур, таких как соя. Британский стартап Moolec придумал, как сделать искусственное мясо дешевле. По словам представителей компании, они могут «вырастить свинину из сои». Хотя детали технологии молекулярного «земледелия» Moolec — коммерческая тайна, представители компании заявляют, что они добавили гены свиней в геном обычноф сои. В результате четверть белков в бобах «Piggy Sooy» этих растений составляют свиные белки — 26,6%, если быть точным. Мясо сои даже имеет розовый, похожий на свинину цвет. Фермеры вырастят «свиную сою» с помощью обычных сельскохозяйственных методов. Собрать и обработать такие бобы планируют, опять же, с помощью обычных методов. Также стартап займется гороховыми растениями, которые произведут белки говядины. Проект пока находится в разработке. Как и в случае со свининой, выращенной в лаборатории, есть надежда, что коммерческий успех «Piggy Sooy», в конечном итоге, сведет на нет разведение и убой свиней, а также связанные с этим этические и экологические проблемы. Сейчас Moolec проводит молекулярные сельскохозяйственные операции в США, Европе и Южной Америке.Проект дрона-охотника "КРАН" video_2023-06-30_21-43-40.mp4Мои корректировки: Лука на 1 кг хватит и луковицы, сахара одну ложку без верха, а то получится десерт к чаю 🤣, масло добавлять не надо - и так все в масле, уксус можно просто можно на глаз налить, пасты полбанки хватит. Маринованная селедка Нам потребуется: - Филе солёной сельди 1кг - Лук репчатый 2-4 шт (средние) - Томатная паста 1 банка (300-400 гр). Лучше всего подходит "Помидорка" - Уксус 9% столовый 12 ст.л (яблочный пробовал, получается не то) - Растительное масло 12 ст.л - Сахар 4 ст.л с горкой Рецепт описан из расчета на 1 кг сельд. Селёдку можно брать целиковую, если в вас сильны традиции семейной медитации за разделыванием над газетой, а можно читернуть и взять готовое филе в масле (масло сливаем). Если берёте целую рыбу, вытаскивать нужно только большие кости, маленькие станут мягкими в маринаде, и их вообще не будет заметно. Режем сельдь на кусочки по 2 - 2,5 см, лук полукольцами или перьями, закидываем в миску, туда же уксус, растительное масло, сахар и томатную пасту. Тщательно все перемешиваем, закрываем пленкой или герметичной крышкой и ставим в холодильник на 12 часов. Через 12 часов вытаскиваем, ещё раз перемешиваем и оставляем ещё на 12 часов. По истечении суток можно есть, но я бы рекомендовал оставлять мариноваться на 48 часов, так будет вкусней.
Стартап придумал, как вырастить трансгенную сою, которая заменит свинину Стартап Moolec разработал уникальную и патентоспособную платформу для экспрессии высокоценных белков в семенах экономически важных культур, таких как соя. Британский стартап Moolec придумал, как сделать искусственное мясо дешевле. По словам представителей компании, они могут «вырастить свинину из сои». Хотя детали технологии молекулярного «земледелия» Moolec — коммерческая тайна, представители компании заявляют, что они добавили гены свиней в геном обычноф сои. В результате четверть белков в бобах «Piggy Sooy» этих растений составляют свиные белки — 26,6%, если быть точным. Мясо сои даже имеет розовый, похожий на свинину цвет. Фермеры вырастят «свиную сою» с помощью обычных сельскохозяйственных методов. Собрать и обработать такие бобы планируют, опять же, с помощью обычных методов. Также стартап займется гороховыми растениями, которые произведут белки говядины. Проект пока находится в разработке. Как и в случае со свининой, выращенной в лаборатории, есть надежда, что коммерческий успех «Piggy Sooy», в конечном итоге, сведет на нет разведение и убой свиней, а также связанные с этим этические и экологические проблемы. Сейчас Moolec проводит молекулярные сельскохозяйственные операции в США, Европе и Южной Америке.Проект дрона-охотника "КРАН" video_2023-06-30_21-43-40.mp4Мои корректировки: Лука на 1 кг хватит и луковицы, сахара одну ложку без верха, а то получится десерт к чаю 🤣, масло добавлять не надо - и так все в масле, уксус можно просто можно на глаз налить, пасты полбанки хватит. Маринованная селедка Нам потребуется: - Филе солёной сельди 1кг - Лук репчатый 2-4 шт (средние) - Томатная паста 1 банка (300-400 гр). Лучше всего подходит "Помидорка" - Уксус 9% столовый 12 ст.л (яблочный пробовал, получается не то) - Растительное масло 12 ст.л - Сахар 4 ст.л с горкой Рецепт описан из расчета на 1 кг сельд. Селёдку можно брать целиковую, если в вас сильны традиции семейной медитации за разделыванием над газетой, а можно читернуть и взять готовое филе в масле (масло сливаем). Если берёте целую рыбу, вытаскивать нужно только большие кости, маленькие станут мягкими в маринаде, и их вообще не будет заметно. Режем сельдь на кусочки по 2 - 2,5 см, лук полукольцами или перьями, закидываем в миску, туда же уксус, растительное масло, сахар и томатную пасту. Тщательно все перемешиваем, закрываем пленкой или герметичной крышкой и ставим в холодильник на 12 часов. Через 12 часов вытаскиваем, ещё раз перемешиваем и оставляем ещё на 12 часов. По истечении суток можно есть, но я бы рекомендовал оставлять мариноваться на 48 часов, так будет вкусней.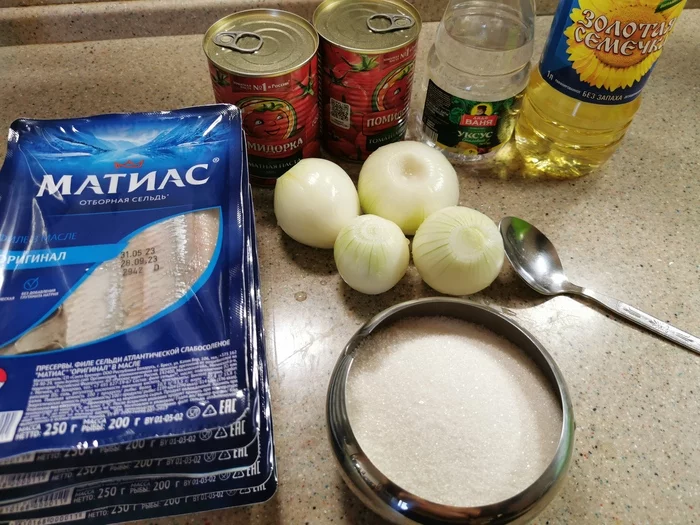

 Деревня Богородская. Бабушка с косой Деревня Богородская. Чаепитие Деревня Богородская. Портрет крестьянки Деревня Богородская. Рукомой Деревня Богородская. Рукомой, подвешенный у стены Деревня Богородская. Косы у окна Деревня Богородская. Дети на крыльце Деревня Богородская. Крестьянский дом Деревня Богородская. Коровы на улице Вокруг деревни Богородской. Вид на деревню Вокруг деревни Богородской. Ручей Вокруг деревни Богородской. Девочка с коромыслом Вокруг деревни Богородской. Разрушенный сарай в поле Вокруг деревни Богородской. Тропинка в поле Вокруг деревни Богородской. Одуванчики Вокруг деревни Богородской. Цветы Вокруг деревни Богородской. ЦветыС временем полета в 30 минут, он никак не улетит на 30 км. Дрон-конструктор "Шум", который легко складывается в рюкзак, представили на выставке "Экипировка" в Москве В сложенном виде вес изделия вместе с рюкзаком составляет шесть килограммов, а сам "Шум" весит четыре килограмма. Дрон может нести полезную нагрузку массой до одного килограмма, рассказал представитель компании-разработчика. Аппарат способен находиться в воздухе до 30 минут, а дальность полета достигает 30 километров.
Деревня Богородская. Бабушка с косой Деревня Богородская. Чаепитие Деревня Богородская. Портрет крестьянки Деревня Богородская. Рукомой Деревня Богородская. Рукомой, подвешенный у стены Деревня Богородская. Косы у окна Деревня Богородская. Дети на крыльце Деревня Богородская. Крестьянский дом Деревня Богородская. Коровы на улице Вокруг деревни Богородской. Вид на деревню Вокруг деревни Богородской. Ручей Вокруг деревни Богородской. Девочка с коромыслом Вокруг деревни Богородской. Разрушенный сарай в поле Вокруг деревни Богородской. Тропинка в поле Вокруг деревни Богородской. Одуванчики Вокруг деревни Богородской. Цветы Вокруг деревни Богородской. ЦветыС временем полета в 30 минут, он никак не улетит на 30 км. Дрон-конструктор "Шум", который легко складывается в рюкзак, представили на выставке "Экипировка" в Москве В сложенном виде вес изделия вместе с рюкзаком составляет шесть килограммов, а сам "Шум" весит четыре килограмма. Дрон может нести полезную нагрузку массой до одного килограмма, рассказал представитель компании-разработчика. Аппарат способен находиться в воздухе до 30 минут, а дальность полета достигает 30 километров.






Аккаунт
Навигация
Поиск
Configure browser push notifications
Chrome (Android)
- Tap the lock icon next to the address bar.
- Tap Permissions → Notifications.
- Adjust your preference.
Chrome (Desktop)
- Click the padlock icon in the address bar.
- Select Site settings.
- Find Notifications and adjust your preference.
Safari (iOS 16.4+)
- Ensure the site is installed via Add to Home Screen.
- Open Settings App → Notifications.
- Find your app name and adjust your preference.
Safari (macOS)
- Go to Safari → Preferences.
- Click the Websites tab.
- Select Notifications in the sidebar.
- Find this website and adjust your preference.
Edge (Android)
- Tap the lock icon next to the address bar.
- Tap Permissions.
- Find Notifications and adjust your preference.
Edge (Desktop)
- Click the padlock icon in the address bar.
- Click Permissions for this site.
- Find Notifications and adjust your preference.
Firefox (Android)
- Go to Settings → Site permissions.
- Tap Notifications.
- Find this site in the list and adjust your preference.
Firefox (Desktop)
- Open Firefox Settings.
- Search for Notifications.
- Find this site in the list and adjust your preference.