


Flanger
Администратор
-
Зарегистрирован
Весь контент Flanger
-
-
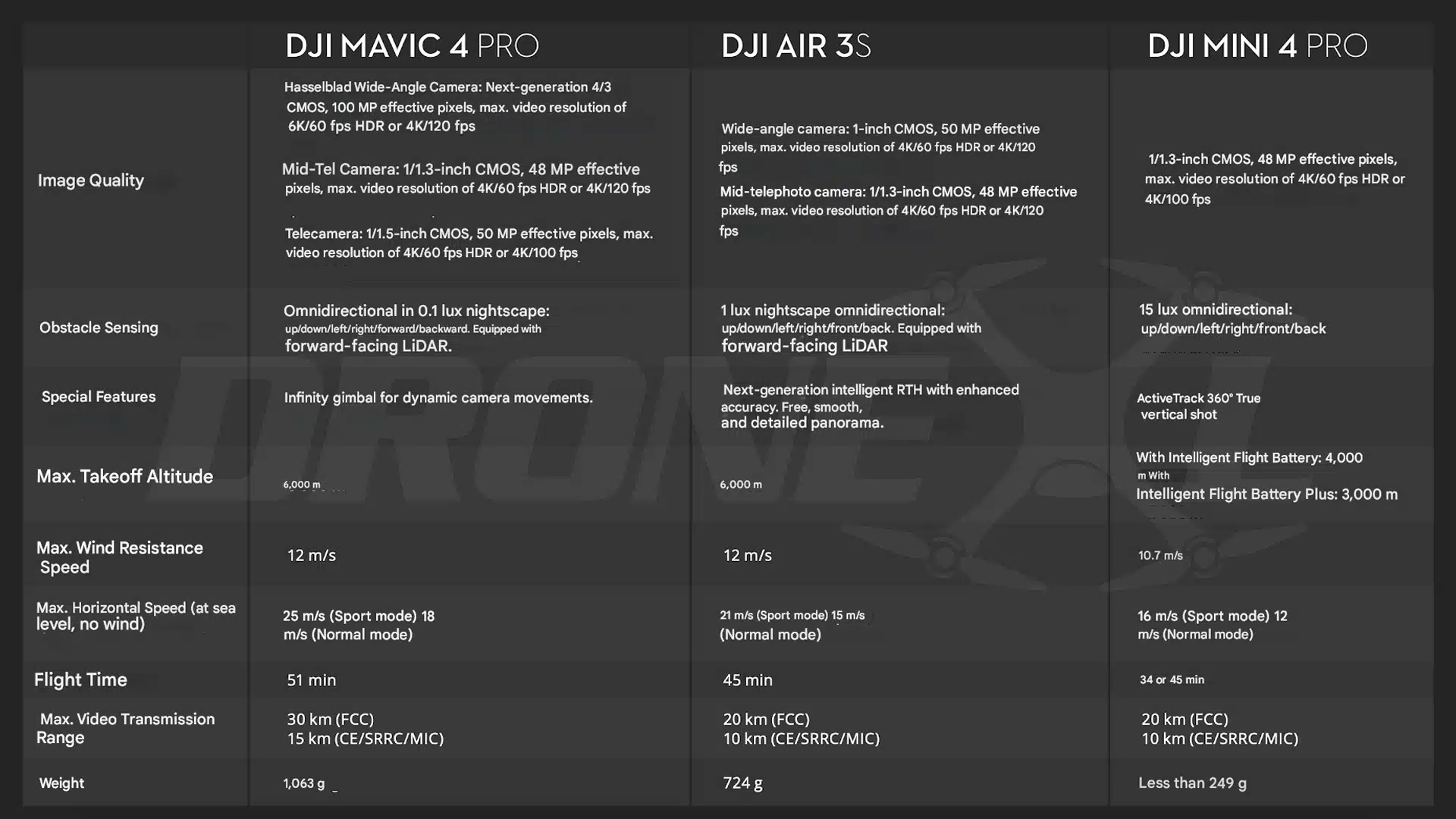
Электроавиация предъявляет особые требования к характеристикам тяговых батарей Даже по экспозиции проходящей сейчас в Шанхае крупнейшей автомобильной выставки заметно, что местные автопроизводители нацелены на выпуск человекоподобных роботов и летательных аппаратов в качестве следующих сегментов рынка, которые собираются осваивать. При этом у летательных аппаратов имеются особые требования к тяговым батареям. Как сообщает Nikkei Asian Review, со ссылкой на китайское издание Caixin, рынок электролётов в одном только Китае к 2030 году достигнут ёмкости $15,4 млрд, поэтому производители аккумуляторов уже сейчас задумываются о выпуске специализированной продукции. Электрической авиации требуются батареи с меньшей массой, более высокой плотностью хранения заряда и более высокой скорости отдачи энергии. По данным Sinolink Securities, совершающий по восемь полётов в день электролёт за 20 лет службы потребует замены тяговых батарей не менее 14 раз, если их расчётная долговечность составит 1000 циклов. Одним из требований, предъявляемых к тяговым батареям для электролётов, становится высокая скорость разряда под нагрузкой. По сути, они должны иметь возможность полностью разрядиться за час от двух до трёх раз, тогда как батареи для электромобилей обычно рассчитаны на однократный разряд в течение часа. Высокая интенсивность передачи электроэнергии к тяговым двигателям нужна для вертикального взлёта и посадки, поскольку это энергозатратный этап перелёта. Подобные свойства при нынешнем уровне развития технологий сказываются на цене батарей. Авиационные становятся в десять раз дороже электромобильных. Например, батарея на 200 кВт·ч для электрического летательного аппарата сама по себе может стоить более $82 000. Темой создания батарей для электрической авиации сейчас интересуются не только крупные игроки электромобильного сегмента типа CATL, CALB, Eve Energy, Gotion Hi-Tech и Farasis Energy, но и различные стартапы. Гиганты могут тратить слишком много ресурсов на электромобильный сегмент, поэтому у молодых компаний в сфере авиации появляются шансы заявить о себе. Например, Shenzhen Inx Technology в прошлом году удалось принять участие в испытательном полёте прототипа EHang, оснащённого тяговой батареей твердотельного типа. Она позволила увеличить продолжительность полёта на 60 % до почти 50 минут. Единственным существенным недостатком разработанной твердотельной батареи остаётся более низкая скорость зарядки, что при регулярной эксплуатации летательных аппаратов может стать проблемой.DJI Mavic 4 отмененные функции: Не будет Cine версии Mavic 4 Pro. Нет Prores. DJI RC track не вернется с DJI Mavic 4. Электронные ND-фильтры не доступны.Промото фотки DJI mavic 4 слили до релиза Полное рекламное описание DJI Mavic 4 Pro: DJI Mavic 4 Pro действительно революционен, оснащен передовыми функциями, которые повышают качество съемки и производительность полета до беспрецедентных уровней. Этот флагманский дрон с тройной камерой готов преобразовать способ создания и изучения новых горизонтов в аэро фотографии. Двойные телеобъективные камеры с большими датчиками CMOS 1/1,3 ″ и 1/1,5 ″ 70-мм средней телеобъективной камеры оснащен большим датчиком CMOS 1/1,3 дюйма, в то время как 168-мм телеобъективная камера оснащена датчиком CMOS 1/1,5 дюйма, предлагая более широкий диапазон фокусных расстояний для творческой гибкости. Обе камеры имеют большую апертуру f/2,8, двойное нативное слияние ISO, фокус отслеживания предмета и возможность записывать видео HDR при 4K/60 кадров в секунду. Они также включают D-Log, обеспечивая постоянную цветовую производительность с основной камерой. Это означает, что вы получаете бесшовный визуальный опыт, независимо от того, какую камеру вы используете. Телеобеспеленная камера 168 мм также позволяет снимать фотографии панорамы, объединяя сверхуровневые перспективы с деталями высокого разрешения. Бесконечный кардинг с вращением на 360 ° для динамических движений камеры. Трех осевой подвес был полностью переработан для поддержки горизонтального вращения на 360, что позволяет динамическим движениям с многоугольными камерами, одновременно позволяя снимать вверх при 70 ° Всенаправленное обнаружение препятствия при яркости всего 0,1 люкс. Аэродинамическая конструкция Mavic 4 Pro, эффективные моторы и ее батареи 95 WH обеспечивает время полета 51 минуты, максимальную скорость 90 км/ч и диапазон в 41 км. Расширенное время полета поддерживает уверенную работу во время разведчики, маневрирования или фотографирования. Mavic 4 Pro оснащен шестью высокопроизводительными широкоугольными камерами с чувствительностью 0.1 Lux и двойными процессорами для осведомленности с высоким разрешением. Может избегать препятствий на скорости до 18 м/с при слабом освещении. В условиях почти темноты (ниже 0,1 люкс) он все еще может использовать свой лидар, направленный вперед, чтобы избежать столкновений. 10-битная передача видео HDR DJI O4+ на более 30 км. Mavic 4 Pro оснащен системой передачи DJI O4+, которая использует запатентованные алгоритмы следующего поколения это обеспечивает 10-разрядную 10-битную передачу изображений HDR до 30 км даже в городской среде. Сравнениt DJI mavic 4 pro, DJI mavic 3S, DJI mini4 pro: Релиз DJI mavic 4 pro намечен на 13 мая.




 Дрон, вдохновленный белкой-летягой, использует выдвижные крылья... чтобы тормозить Даже самые маевренные квадрокоптеры все еще испытывают трудности с остановкой бокового импульса при быстром движении, что ограничивает их маневренность. Экспериментальный дрон решает эту проблему био-вдохновленным способом, выдвигая перепончатые крылья, как у белки-летяги, по мере необходимости. Разработанный Дохёном Ли, Джун-Гиллом Кангом и Сухи Ханом в Южнокорейском университете науки и технологий Пхохана (POSTECH), этот миниатюрный летательный аппарат большую часть времени летает как обычный квадрокоптер. Он включает в себя обычную компоновку квадрокоптера с центральным корпусом, содержащим электронику, окруженным четырьмя пропеллерными наконечниками. Однако между передними и задними лучами с каждой стороны находится крыло из силиконовой мембраны, вдохновленное белкой-летягой. Эти крылья остаются сложенными во время полета, что позволяет дрону оставаться относительно обтекаемым. Однако, когда требуется резкое замедление, крылья одновременно выдвигаются с помощью сервоприводного четырехзвенного механизма связи (по одному механизму на крыло). Дрон одновременно опускает заднюю часть, позволяя захватывающим воздух крыльям оказывать максимальное тормозное усилие посредством аэродинамического сопротивления. Затем самолет может зависнуть на месте, взлететь в другом направлении или использовать крылья для планирования и посадки. ЗЫ Помне так полная шляпа, фристайловые дроны, да и обычные, тормозят практически мнгновенно.Анучин(Онучин) Василий Иванович 02 (14) апреля 1875 — 04 ноября 1941 Этнограф, прозаик, публицист, близкий социалистам-революционерам и сибирским областникам политический деятель, профессор Казанского университета. Родился в 1875 в с. Базаиха Енисейской губернии в семье рабочего золотых промыслов. В 1886 году окончил церковно-приходскую школу, в 1891 — Красноярское духовное училище, поступил в Томскую духовную семинарию, но в 1896 по собственному прошению был отчислен. В 1897 году переехал в Санкт-Петербург, где окончив археологический институт в Санкт-Петербурге, работал в Музее антропологии АН. Занимался изучением народов Сибири. В 1905—1909 гг. участвовал в экспедициях к енисейским кетам. Начиная с 1900 г. публикует литературные произведения, в 1914 г. в Петербурге издаются его «Очерки шаманства у енисейских остяков». В декабре 1904 г. заочно избран правителем дел Красноярского подотдела Восточно-Сибирского отдела ИРГО, но уже в 1906 г. снят с должности в связи с контрпродуктивностью работы. В ходе Первой русской революции примыкает к эсерам, в течение полугода издаёт газету «Красноярский дневник». Неудачно пытался избраться в Государственную думу, поддержал кандидатуру Вл. М. Крутовского. В 1910 г. переезжает в Санкт-Петербург, осенью 1911 г. обосновался в Томске и зарабатывал на жизнь публичными лекциями и статьями в периодике. Проявлял себя как сторонник сибирского областничества, входил с состав т. н. «Потанинского кружка». В 1917 году, после февральской революции, стал членом, а затем заместителем председателя Временного комитета общественного порядка и безопасности в Томске. Был избран также депутатом Томского губернского народного собрания, однако дальнейшему карьерному росту Анучина воспрепятствовал А. В. Адрианов, начавший со страниц «Сибирской жизни» успешную кампанию по его дискредитации. 6 марта 1918 г. в Улале был избран председателем инородческого съезда, на котором выступает за создание автономного Каракорум-Алтайского округа и дальнейшее объединение земель алтайцев, хакасов, тувинцев и монголов в единую республику Ойрот. Позднее работал в комитете по национальным делам Сибирской областной думы. После октябрьской революции за политическую деятельность его 17 раз арестовывали и дважды приговаривали к смертной казни. В сентябре 1922 года был арестован ЧК и был обвинен в подготовке отделения Сибири от России, затем сослан в Казань с разрешением научной работы в университете. В Казани Василий Иванович служил секретарём по научным поручениям, постоянно находился под надзором ОГПУ. После ареста и высылки в 1923—1924 гг. руководителем ОИАЭ, обвинённых в монархизме и поддержке патриарха Тихона, в декабре 1924 года также лишён права преподать и выслан в Весьегонск Тверской губернии с запрещением проживания в студенческих городах до 1926 года. В 1925 году по пути в Тверь встретился в Москве с Ф. Э. Дзержинским, в результате чего высылку отменили, и Василий Иванович был назначен в Казанский университет профессором. В 1929 году переехал в Самарканд, где и работал до кончины в местном педагогическом институте, присвоив себе учёное звание профессора. Умер ссыльным. Некоторыми историками считается фальсификатором, частично подделавшим свою переписку с Лениным и М. Горьким. В долине реки Имбак В Каровнике (правый берег Енисея) Вид в окрестностях станка (станицы) Имбатска Вид Монастырской протоки Вид Монастырской протоки Вид на острова Кораблик и Барочка Вид на правый берег реки Енисей в Алинском плесе Вид на правый берег реки Енисей в Кангатовском плесе Вид на реку Енисей ниже станка Алинска Деревня Бахта. Амбар и лабаз для просушивания сетей Деревня Бахта. Баня «по черному» Деревня Бахта. Вид на реку в районе деревни Деревня Сумароково. «Рундук» - крыльцо Деревня Сумароково. Амбар с предамбарьем Деревня Сумароково. Вид на берег р. Енисей Село Амбацкое. Амбар с предамбарьем Село Верхнеимбатск. «Новая» улица Село Верхнеимбатск. Амбар, погреб, кладбище, лабаз для сена Село Верхнеимбатск. Амбары Село Верхнеимбатск. Баня «по белому» Село Верхнеимбатск. Вид на главную улицу Село Ворогово. «Огород» для просушивания самоловов. Село Ворогово. «Огород» для просушивания самоловов Группа крестьянских девушек из деревни Сумароково Групповой портрет семьи Калуцких из деревни Сумароково Вид на реку Енисей Вид на ст. Сумароково Глинисто-песчаный яр на правом берегу реки Енисей Деревянная церковь в селе Подкаменном Деревянная церковь деревни Сумароково Дети благочинного о. Кирилла в Туруханске Дом бедняка в деревне Сумароково Дом бедняка из барочного леса в селе Имбацкое Зимовье (кухня и помещение для работников) в селе Имбацкое Дом зажиточного крестьянина. Верхне-Имбатск Дом зажиточного крестьянина. Верхне-Имбатск Дом крестьянина средней зажиточности. Верхне-Имбатск Дом крестьянина средней зажиточности. Верхне-Имбатск Дом фельдшера И.Г. Козырева. Верхне-Имбатск Загон для лошадей. Верхне-Имбатск Загон и лабаз. Верхне-Имбатск Здание школы. Верхне-Имбатск Каменная церковь. Верхне-ИмбатскDJI Mini 5 замечен на улицах в Китае! Похоже, это будет первый дрон серии мини, с защитой пропеллеров. Релиз скорее всего будет или в августе, или в сентябре.
Дрон, вдохновленный белкой-летягой, использует выдвижные крылья... чтобы тормозить Даже самые маевренные квадрокоптеры все еще испытывают трудности с остановкой бокового импульса при быстром движении, что ограничивает их маневренность. Экспериментальный дрон решает эту проблему био-вдохновленным способом, выдвигая перепончатые крылья, как у белки-летяги, по мере необходимости. Разработанный Дохёном Ли, Джун-Гиллом Кангом и Сухи Ханом в Южнокорейском университете науки и технологий Пхохана (POSTECH), этот миниатюрный летательный аппарат большую часть времени летает как обычный квадрокоптер. Он включает в себя обычную компоновку квадрокоптера с центральным корпусом, содержащим электронику, окруженным четырьмя пропеллерными наконечниками. Однако между передними и задними лучами с каждой стороны находится крыло из силиконовой мембраны, вдохновленное белкой-летягой. Эти крылья остаются сложенными во время полета, что позволяет дрону оставаться относительно обтекаемым. Однако, когда требуется резкое замедление, крылья одновременно выдвигаются с помощью сервоприводного четырехзвенного механизма связи (по одному механизму на крыло). Дрон одновременно опускает заднюю часть, позволяя захватывающим воздух крыльям оказывать максимальное тормозное усилие посредством аэродинамического сопротивления. Затем самолет может зависнуть на месте, взлететь в другом направлении или использовать крылья для планирования и посадки. ЗЫ Помне так полная шляпа, фристайловые дроны, да и обычные, тормозят практически мнгновенно.Анучин(Онучин) Василий Иванович 02 (14) апреля 1875 — 04 ноября 1941 Этнограф, прозаик, публицист, близкий социалистам-революционерам и сибирским областникам политический деятель, профессор Казанского университета. Родился в 1875 в с. Базаиха Енисейской губернии в семье рабочего золотых промыслов. В 1886 году окончил церковно-приходскую школу, в 1891 — Красноярское духовное училище, поступил в Томскую духовную семинарию, но в 1896 по собственному прошению был отчислен. В 1897 году переехал в Санкт-Петербург, где окончив археологический институт в Санкт-Петербурге, работал в Музее антропологии АН. Занимался изучением народов Сибири. В 1905—1909 гг. участвовал в экспедициях к енисейским кетам. Начиная с 1900 г. публикует литературные произведения, в 1914 г. в Петербурге издаются его «Очерки шаманства у енисейских остяков». В декабре 1904 г. заочно избран правителем дел Красноярского подотдела Восточно-Сибирского отдела ИРГО, но уже в 1906 г. снят с должности в связи с контрпродуктивностью работы. В ходе Первой русской революции примыкает к эсерам, в течение полугода издаёт газету «Красноярский дневник». Неудачно пытался избраться в Государственную думу, поддержал кандидатуру Вл. М. Крутовского. В 1910 г. переезжает в Санкт-Петербург, осенью 1911 г. обосновался в Томске и зарабатывал на жизнь публичными лекциями и статьями в периодике. Проявлял себя как сторонник сибирского областничества, входил с состав т. н. «Потанинского кружка». В 1917 году, после февральской революции, стал членом, а затем заместителем председателя Временного комитета общественного порядка и безопасности в Томске. Был избран также депутатом Томского губернского народного собрания, однако дальнейшему карьерному росту Анучина воспрепятствовал А. В. Адрианов, начавший со страниц «Сибирской жизни» успешную кампанию по его дискредитации. 6 марта 1918 г. в Улале был избран председателем инородческого съезда, на котором выступает за создание автономного Каракорум-Алтайского округа и дальнейшее объединение земель алтайцев, хакасов, тувинцев и монголов в единую республику Ойрот. Позднее работал в комитете по национальным делам Сибирской областной думы. После октябрьской революции за политическую деятельность его 17 раз арестовывали и дважды приговаривали к смертной казни. В сентябре 1922 года был арестован ЧК и был обвинен в подготовке отделения Сибири от России, затем сослан в Казань с разрешением научной работы в университете. В Казани Василий Иванович служил секретарём по научным поручениям, постоянно находился под надзором ОГПУ. После ареста и высылки в 1923—1924 гг. руководителем ОИАЭ, обвинённых в монархизме и поддержке патриарха Тихона, в декабре 1924 года также лишён права преподать и выслан в Весьегонск Тверской губернии с запрещением проживания в студенческих городах до 1926 года. В 1925 году по пути в Тверь встретился в Москве с Ф. Э. Дзержинским, в результате чего высылку отменили, и Василий Иванович был назначен в Казанский университет профессором. В 1929 году переехал в Самарканд, где и работал до кончины в местном педагогическом институте, присвоив себе учёное звание профессора. Умер ссыльным. Некоторыми историками считается фальсификатором, частично подделавшим свою переписку с Лениным и М. Горьким. В долине реки Имбак В Каровнике (правый берег Енисея) Вид в окрестностях станка (станицы) Имбатска Вид Монастырской протоки Вид Монастырской протоки Вид на острова Кораблик и Барочка Вид на правый берег реки Енисей в Алинском плесе Вид на правый берег реки Енисей в Кангатовском плесе Вид на реку Енисей ниже станка Алинска Деревня Бахта. Амбар и лабаз для просушивания сетей Деревня Бахта. Баня «по черному» Деревня Бахта. Вид на реку в районе деревни Деревня Сумароково. «Рундук» - крыльцо Деревня Сумароково. Амбар с предамбарьем Деревня Сумароково. Вид на берег р. Енисей Село Амбацкое. Амбар с предамбарьем Село Верхнеимбатск. «Новая» улица Село Верхнеимбатск. Амбар, погреб, кладбище, лабаз для сена Село Верхнеимбатск. Амбары Село Верхнеимбатск. Баня «по белому» Село Верхнеимбатск. Вид на главную улицу Село Ворогово. «Огород» для просушивания самоловов. Село Ворогово. «Огород» для просушивания самоловов Группа крестьянских девушек из деревни Сумароково Групповой портрет семьи Калуцких из деревни Сумароково Вид на реку Енисей Вид на ст. Сумароково Глинисто-песчаный яр на правом берегу реки Енисей Деревянная церковь в селе Подкаменном Деревянная церковь деревни Сумароково Дети благочинного о. Кирилла в Туруханске Дом бедняка в деревне Сумароково Дом бедняка из барочного леса в селе Имбацкое Зимовье (кухня и помещение для работников) в селе Имбацкое Дом зажиточного крестьянина. Верхне-Имбатск Дом зажиточного крестьянина. Верхне-Имбатск Дом крестьянина средней зажиточности. Верхне-Имбатск Дом крестьянина средней зажиточности. Верхне-Имбатск Дом фельдшера И.Г. Козырева. Верхне-Имбатск Загон для лошадей. Верхне-Имбатск Загон и лабаз. Верхне-Имбатск Здание школы. Верхне-Имбатск Каменная церковь. Верхне-ИмбатскDJI Mini 5 замечен на улицах в Китае! Похоже, это будет первый дрон серии мини, с защитой пропеллеров. Релиз скорее всего будет или в августе, или в сентябре.
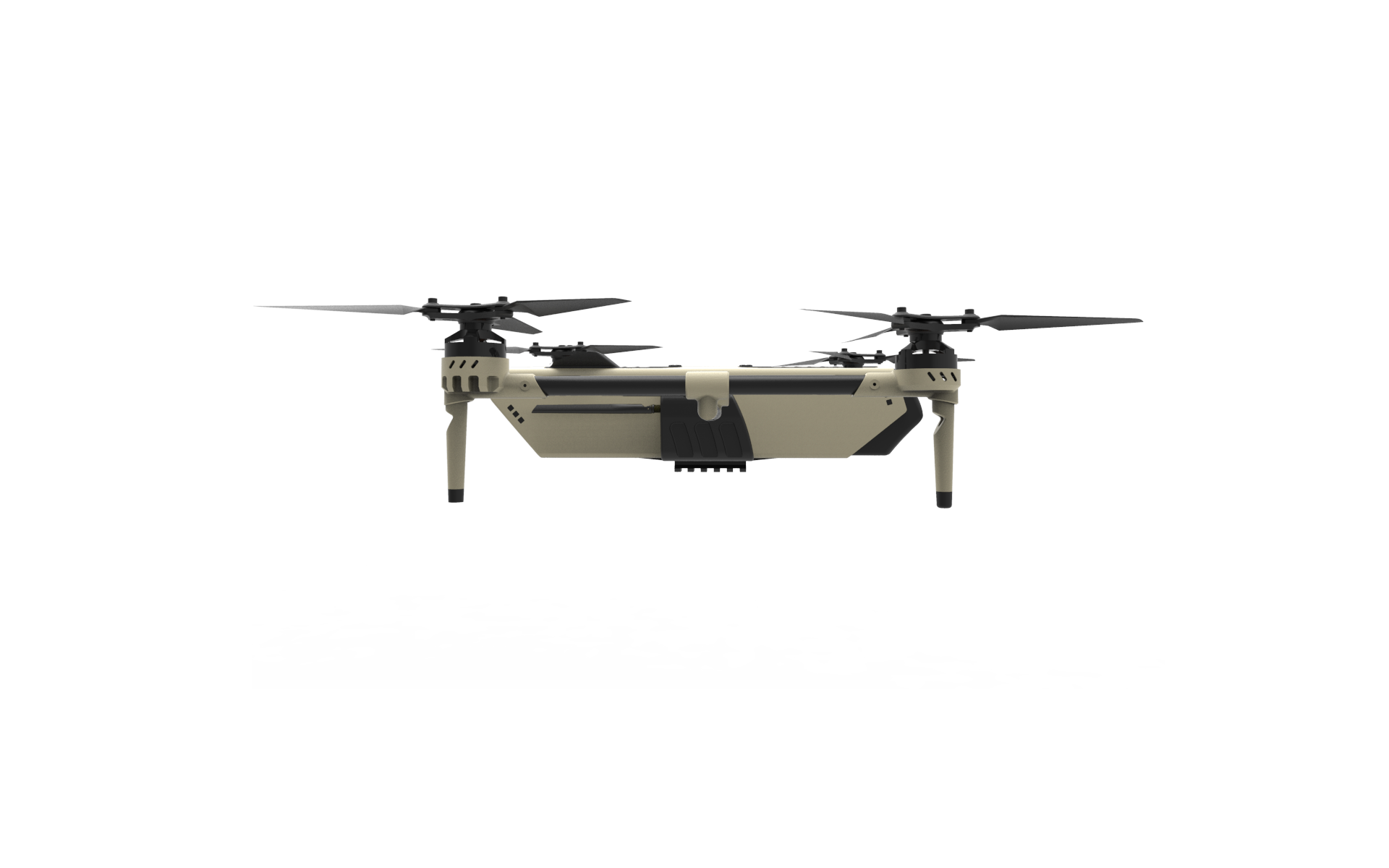
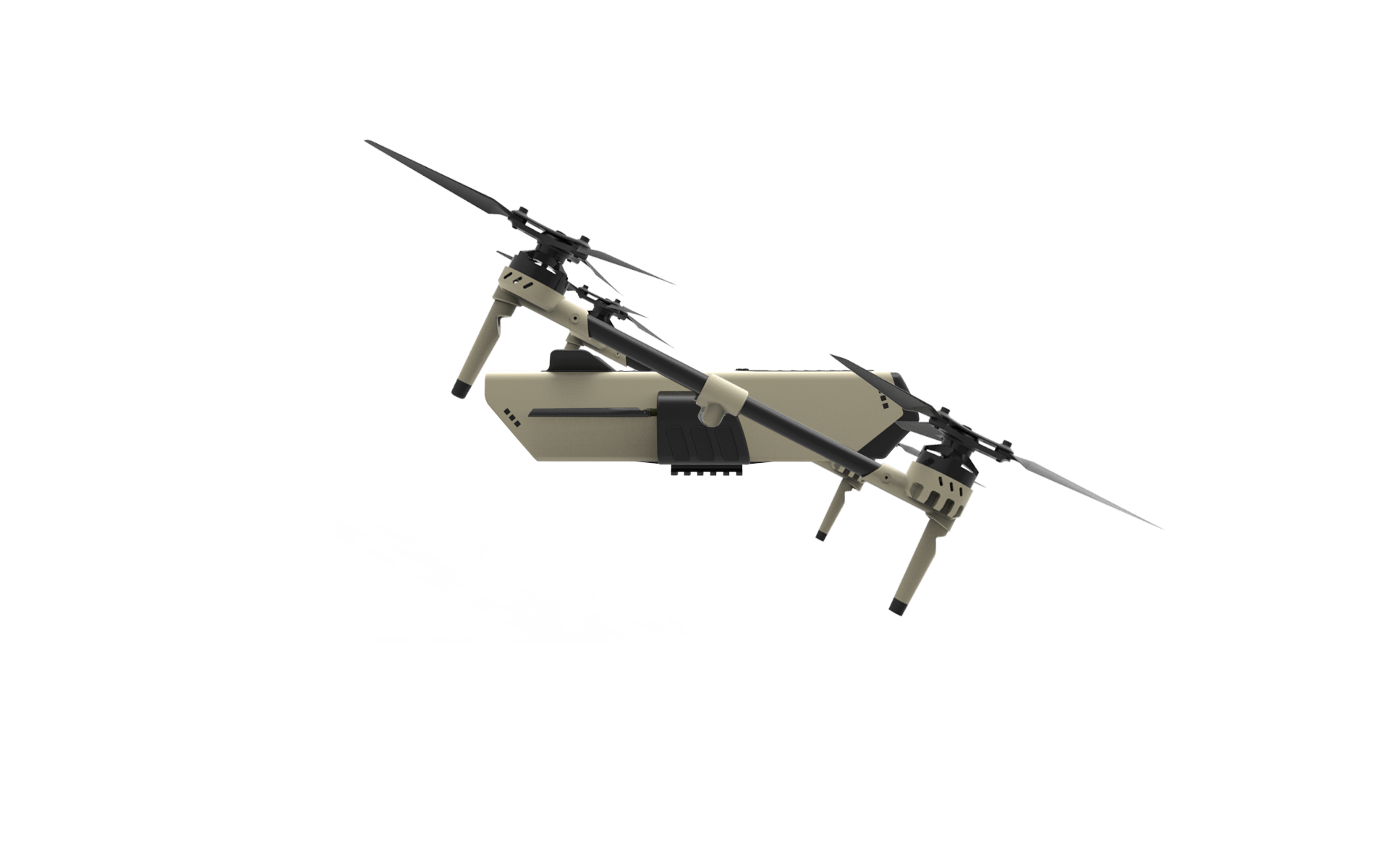
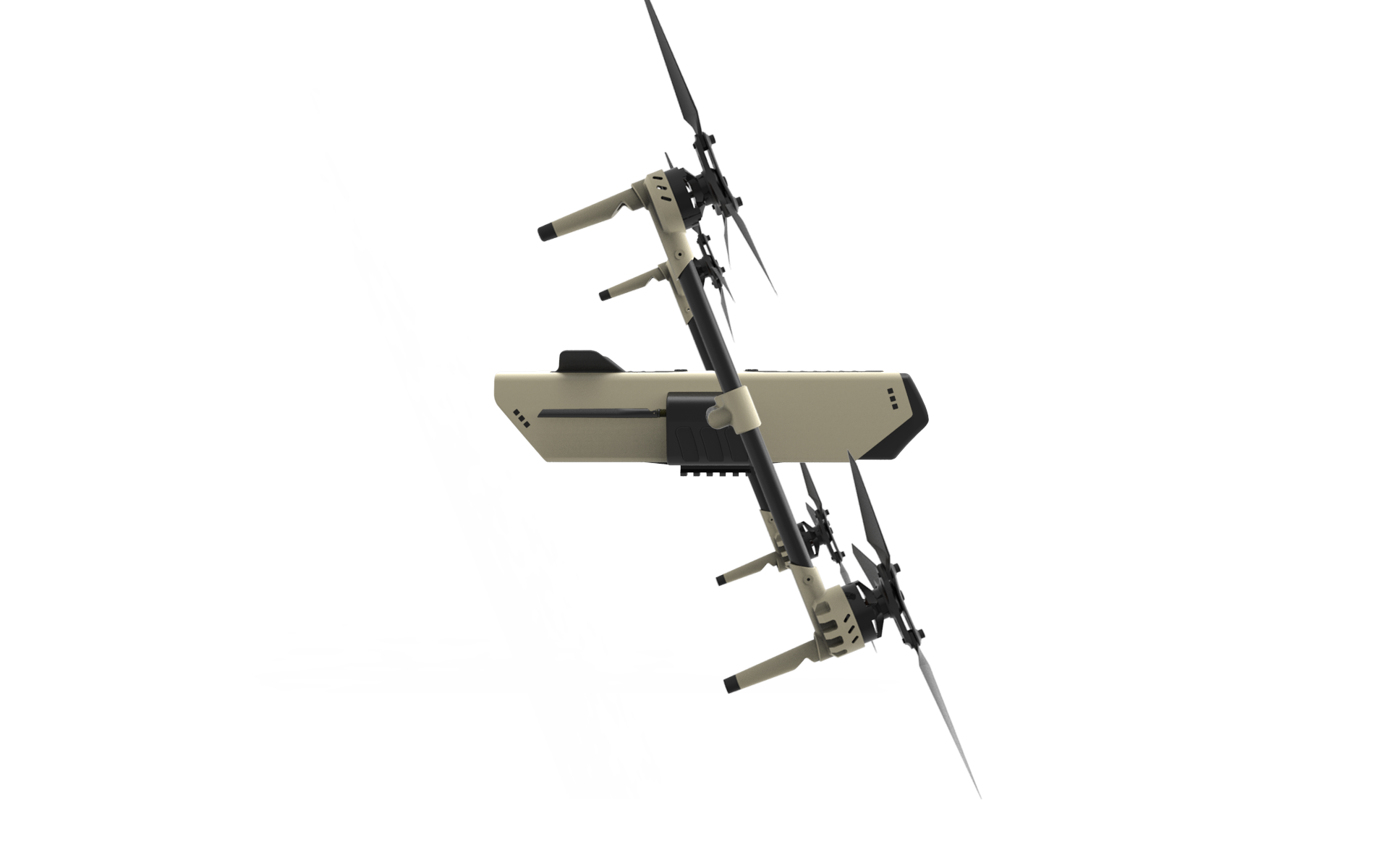
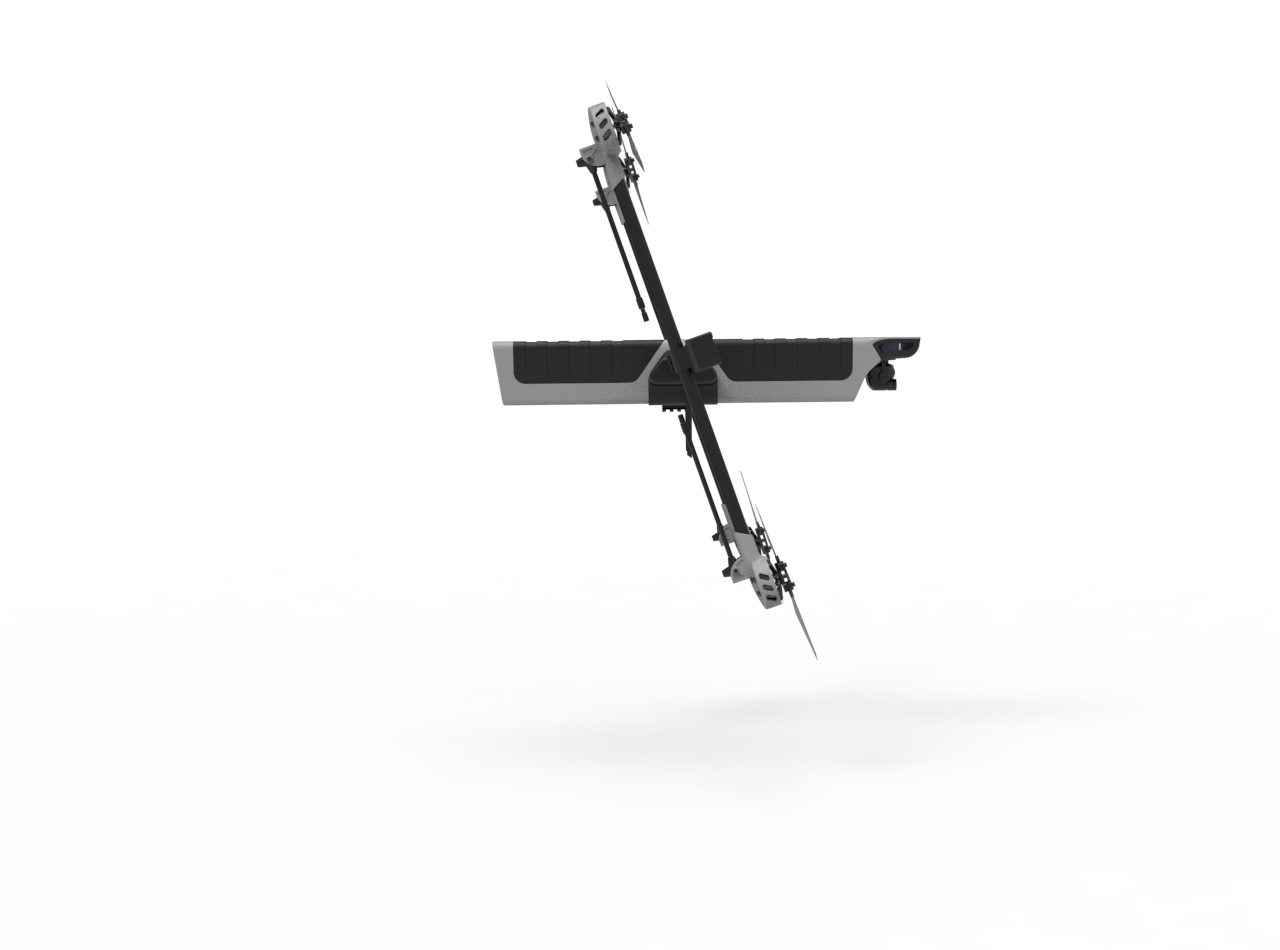
 Исследователи из Италии неожиданно обнаружили связь между потреблением слишком большого количества курицы, которая обычно считается более полезной, и раком желудочно-кишечного тракта. Результаты они опубликовали в журнале Nutrients. Ученые из Национального института гастроэнтерологии (Италия) собрали из двух баз данных информацию о состоянии здоровья и рационе 4869 человек (48,39 процента — женщины), живущих на юге Италии. Среднее время наблюдения составило 18,8 года. Самому молодому участнику было 18 лет, старшему (на 31 декабря 2024 года, когда сбор данных завершился) — 105 лет. За годы наблюдений умерли в общей сложности 1028 участников (21,1 процента). Среди этих смертей 108 (10,5 процента) были вызваны различными видами рака желудочно-кишечного тракта. Ученые проанализировали у участников исследования еженедельное потребление красного и белого мяса, учитывая их количество и соотношение. Белое мясо составляло около 41 процента еженедельного мясного рациона. Затем, применив различные модели так называемого регрессионного анализа, ученые рассчитали риск смерти от рака ЖКТ в выборке. Исследователи учли разнообразные показатели состояния здоровья, образ жизни, пол, наличие вредных привычек, профессию, образование, семейное положение и другие факторы. Ученые обнаружили: при потреблении более 300 граммов мяса птицы в неделю риск смерти от рака желудочно-кишечного тракта увеличивался на 27 процентов относительно тех, кто ел его меньше 100 граммов в неделю. В то же время участники исследования, скончавшиеся от не связанных с пищеварительной системой видов рака, отличались повышенным потреблением красного мяса. Оно составляло значительную долю еженедельного потребления мяса в целом этими мужчинами и женщинами — 64 процента. Тем не менее ученые не торопятся делать общие выводы. Во-первых, обсервационные исследования в принципе не могут установить зависимость «причина — следствие». Результаты лишь указывают на возможную связь между потреблением мяса птицы и риском. Во-вторых, нет данных о потреблении фастфуда, конкретных способах приготовления белого и красного мяса и в целом об особенностях пищевых привычек в выборке. В-третьих, исследователи не учитывали физическую активность, в то время как она оказывает существенное влияние на состояние здоровья. И, наконец, результаты, полученные на юге Италии, могут существенно отличаться от итогов подобных исследований в других регионах. Пока ученые достаточно определенно говорят только о вреде ультраобработанных продуктов: лапши быстрого приготовления, чипсов, газированных напитков с высоким содержанием сахара, полуфабрикатов, готовых завтраков, бургеров и многого другого. Например, согласно когортному исследованию, в котором участвовали 104 980 жителей Франции (средний возраст — 42,8 года), потребление таких продуктов ассоциируется с более высоким риском рака груди, предстательной железы и колоректального рака.a4PAREv_460svvp9.webmКитай контролирует 90% мирового рынка комплектующих для беспилотников, в результате чего американские производители дронов, в том числе ударных MQ-9 Reaper, находятся в полной зависимости от китайских поставок. Если США попытаются "отрезать" Китай, это разрушит американскую индустрию беспилотников. /Forbes/Китайский тактический микро-дрон: компактность и многозадачность для пехоты IMG_0506.MP4 В Китае представлен новый тактический микро-дрон соосной схемы, предназначенный для поддержки пехотных подразделений. Благодаря двум винтам на одной оси, дрон весом менее 1 кг отличается высокой грузоподъемностью (несет вдвое больше своего веса) и маневренностью. Компактный корпус в виде тубуса и складные лопасти облегчают переноску. Дрон универсален в запуске: его можно подбросить рукой или выстрелить из 35-мм подствольного гранатомета для увеличения дистанции. Модульная конструкция позволяет быстро менять задачи: установка камеры превращает его в разведчика, а специальный модуль дает возможность нести и применять до трех ручных гранат для огневой поддержки. Заявлена интеграция ИИ для улучшения автономности и распознавания целей.Дроны от https://trim-robotics.com Peregrine SR: Flight Speed cruise 90km/h (56mph) dash 180km/h (112mph) System Weight 1.6 Kg (3.5lb) Data Link S-band AES-256 encrypted Max Payload 250gr (0.5lb) Endurance Recon config - 18min Lethal config - 10min Range 5Km (3.1 miles) Peregrine MR: Cruise 90km/h (56mph) Dash 180km/H (112mph) System Weight 4.4 Kg (9.7lb) Data Link S-band AES-256 encrypted Max Payload Up To 1.4 Kg (3.1lb) Endurance Recon config - 27 min Lethal config - 15 min Range 6Km (3.7 Miles)
Исследователи из Италии неожиданно обнаружили связь между потреблением слишком большого количества курицы, которая обычно считается более полезной, и раком желудочно-кишечного тракта. Результаты они опубликовали в журнале Nutrients. Ученые из Национального института гастроэнтерологии (Италия) собрали из двух баз данных информацию о состоянии здоровья и рационе 4869 человек (48,39 процента — женщины), живущих на юге Италии. Среднее время наблюдения составило 18,8 года. Самому молодому участнику было 18 лет, старшему (на 31 декабря 2024 года, когда сбор данных завершился) — 105 лет. За годы наблюдений умерли в общей сложности 1028 участников (21,1 процента). Среди этих смертей 108 (10,5 процента) были вызваны различными видами рака желудочно-кишечного тракта. Ученые проанализировали у участников исследования еженедельное потребление красного и белого мяса, учитывая их количество и соотношение. Белое мясо составляло около 41 процента еженедельного мясного рациона. Затем, применив различные модели так называемого регрессионного анализа, ученые рассчитали риск смерти от рака ЖКТ в выборке. Исследователи учли разнообразные показатели состояния здоровья, образ жизни, пол, наличие вредных привычек, профессию, образование, семейное положение и другие факторы. Ученые обнаружили: при потреблении более 300 граммов мяса птицы в неделю риск смерти от рака желудочно-кишечного тракта увеличивался на 27 процентов относительно тех, кто ел его меньше 100 граммов в неделю. В то же время участники исследования, скончавшиеся от не связанных с пищеварительной системой видов рака, отличались повышенным потреблением красного мяса. Оно составляло значительную долю еженедельного потребления мяса в целом этими мужчинами и женщинами — 64 процента. Тем не менее ученые не торопятся делать общие выводы. Во-первых, обсервационные исследования в принципе не могут установить зависимость «причина — следствие». Результаты лишь указывают на возможную связь между потреблением мяса птицы и риском. Во-вторых, нет данных о потреблении фастфуда, конкретных способах приготовления белого и красного мяса и в целом об особенностях пищевых привычек в выборке. В-третьих, исследователи не учитывали физическую активность, в то время как она оказывает существенное влияние на состояние здоровья. И, наконец, результаты, полученные на юге Италии, могут существенно отличаться от итогов подобных исследований в других регионах. Пока ученые достаточно определенно говорят только о вреде ультраобработанных продуктов: лапши быстрого приготовления, чипсов, газированных напитков с высоким содержанием сахара, полуфабрикатов, готовых завтраков, бургеров и многого другого. Например, согласно когортному исследованию, в котором участвовали 104 980 жителей Франции (средний возраст — 42,8 года), потребление таких продуктов ассоциируется с более высоким риском рака груди, предстательной железы и колоректального рака.a4PAREv_460svvp9.webmКитай контролирует 90% мирового рынка комплектующих для беспилотников, в результате чего американские производители дронов, в том числе ударных MQ-9 Reaper, находятся в полной зависимости от китайских поставок. Если США попытаются "отрезать" Китай, это разрушит американскую индустрию беспилотников. /Forbes/Китайский тактический микро-дрон: компактность и многозадачность для пехоты IMG_0506.MP4 В Китае представлен новый тактический микро-дрон соосной схемы, предназначенный для поддержки пехотных подразделений. Благодаря двум винтам на одной оси, дрон весом менее 1 кг отличается высокой грузоподъемностью (несет вдвое больше своего веса) и маневренностью. Компактный корпус в виде тубуса и складные лопасти облегчают переноску. Дрон универсален в запуске: его можно подбросить рукой или выстрелить из 35-мм подствольного гранатомета для увеличения дистанции. Модульная конструкция позволяет быстро менять задачи: установка камеры превращает его в разведчика, а специальный модуль дает возможность нести и применять до трех ручных гранат для огневой поддержки. Заявлена интеграция ИИ для улучшения автономности и распознавания целей.Дроны от https://trim-robotics.com Peregrine SR: Flight Speed cruise 90km/h (56mph) dash 180km/h (112mph) System Weight 1.6 Kg (3.5lb) Data Link S-band AES-256 encrypted Max Payload 250gr (0.5lb) Endurance Recon config - 18min Lethal config - 10min Range 5Km (3.1 miles) Peregrine MR: Cruise 90km/h (56mph) Dash 180km/H (112mph) System Weight 4.4 Kg (9.7lb) Data Link S-band AES-256 encrypted Max Payload Up To 1.4 Kg (3.1lb) Endurance Recon config - 27 min Lethal config - 15 min Range 6Km (3.7 Miles)
















Аккаунт
Навигация
Поиск
Configure browser push notifications
Chrome (Android)
- Tap the lock icon next to the address bar.
- Tap Permissions → Notifications.
- Adjust your preference.
Chrome (Desktop)
- Click the padlock icon in the address bar.
- Select Site settings.
- Find Notifications and adjust your preference.
Safari (iOS 16.4+)
- Ensure the site is installed via Add to Home Screen.
- Open Settings App → Notifications.
- Find your app name and adjust your preference.
Safari (macOS)
- Go to Safari → Preferences.
- Click the Websites tab.
- Select Notifications in the sidebar.
- Find this website and adjust your preference.
Edge (Android)
- Tap the lock icon next to the address bar.
- Tap Permissions.
- Find Notifications and adjust your preference.
Edge (Desktop)
- Click the padlock icon in the address bar.
- Click Permissions for this site.
- Find Notifications and adjust your preference.
Firefox (Android)
- Go to Settings → Site permissions.
- Tap Notifications.
- Find this site in the list and adjust your preference.
Firefox (Desktop)
- Open Firefox Settings.
- Search for Notifications.
- Find this site in the list and adjust your preference.