


Flanger
Администратор
-
Зарегистрирован
Весь контент Flanger
-
-
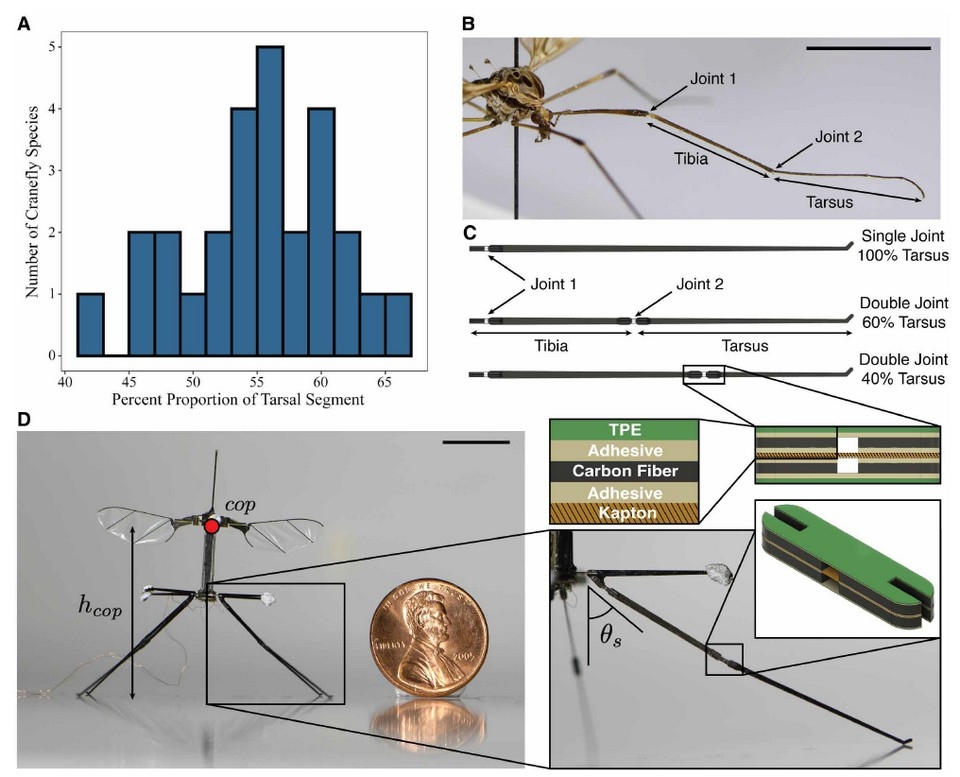
Робопчелу научили садиться по-комарьи Чтобы избежать падений из-за экранного эффекта Nak-seung P. Hyun et al. / Science Robotics, 2025 Американские инженеры разработали шасси для миниатюрного орнитоптера RoboBee, которое позволяет хрупкому микродрону с массой меньше 100 миллиграмм совершать безопасную посадку, не опасаясь падений и поломок из-за воздушных потоков вблизи поверхности. Каждая из четырех посадочных опор состоит из двух углеволоконных сегментов, соединенных двумя упругими суставами, играющими роль амортизаторов. Испытания показали, что робопчела может успешно приземляться на различные поверхности, демонстрируя повышенную устойчивость и надежность посадки по сравнению с предыдущей версией опор. Статья опубликована в журнале Science Robotics. Инженеры из Гарварда уже больше десяти лет работают над созданием миниатюрных махолетов размером с насекомое. Первый рабочий прототип робопчелы RoboBee массой около 100 миллиграмм они представили еще в 2013 году. С тех пор в конструкцию микродрона было внесено множество улучшений. Робопчелу, например, научили плавать под водой и выныривать, прилипать с помощью электроадгезии к поверхностям и летать, используя энергию света. Для полета микроорнитоптер использует пьезоэлектрические актуаторы — тонкие пластины, которые изгибаются под действием электрического поля, приводя в движение крылья с частотой до 170 герц. Они энергоэффективны и легки, но не очень прочны и легко ломаются при ударах. Предыдущие поколения RoboBee оснащались простыми жесткими ножками из углеволокна, предназначенными только для удержания аппарата в стоячем положении, но не для амортизации при посадке. Поэтому во время приземления возникал высокий риск поломок — полет робопчелы вблизи поверхности очень неустойчив из-за возникающих при этом воздушных потоков и вихрей (эффект близости поверхности, он же экранный эффект). В своей новой работе инженеры под руководством Роберта Вуда (Robert J. Wood) из Гарвардского университета попытались решить проблему безопасной посадки робопчелы, разработав для нее новое шасси. Чтобы во время приземления двукрылый робот массой 100 миллиграмм с размахом крыльев 30 миллиметров оставался выше критической зоны аэродинамической нестабильности, вызванной эффектом близости поверхности, было решено сделать ноги робота более длинными. Источником вдохновения для конструкции опор стал комар-долгоножка. Это крупное насекомое схожее размером с RoboBee обладает очень длинными ногами, которые служат эффективными демпферами, гасящими энергию при посадке. Разработчики подробно изучили пропорции ног 27 реальных насекомых — соотношение длин сегментов (голени и лапки), а также расположение суставов. Основываясь на этой информации, они спроектировали несколько вариантов искусственных ног с сегментами из углеволокна и суставами из полиимидной пленки (каптон) и термопластичного эластомера (TPE). Во время испытаний разработчики оценивали три параметра: насколько сильно робот с четырьмя опорами будет отскакивать после приземления, насколько он при этом смещается по горизонтали (точность приземления), а также вероятность того, что он вообще удержится на ногах. В результате наиболее оптимальным оказался вариант ног с двумя суставами, в котором нижний сегмент составляет 60 процентов от общей длины. По сравнению с жесткими ногами изначальной версии, новая конструкция значительно снизила отскок и позволила роботу успешно приземляться даже при крене до тридцати градусов. Конструкция ног: (A) Гистограмма измерений ног у 27 видов комаров-долгоножек. (B) Крупный план ноги долгоножки (Tipula abdominalis). (C) Иллюстрации различных конструкций ног. (D) Изображение RoboBee с двухсуставной амортизирующей ногой. Крупный план ноги показывает расположение сустава. Nak-seung P. Hyun et al. / Science Robotics, 2025 Также инженеры создали систему управления, обеспечивающую точную и мягкую посадку. Они использовали подход, которые применяют некоторые летающие насекомые: перед посадкой робот сначала ускоряется, а затем на финальном этапе замедляется, аккуратно приближаясь к поверхности. В самом конце перед касанием робот переходит в режим свободного падения, полностью полагаясь на амортизирующие свойства ног. Финальным испытанием стала демонстрация посадки в реальных условиях на лист комнатного растения. Робот взлетел с одного листа, перелетел на другой и успешно приземлился на его податливую поверхность. Несмотря на то, что лист слегка качнулся после контакта, робот сохранил равновесие. В будущем авторы планируют исследовать возможность безопасного приземления робота на более неровные поверхности, включая наклонные. Кроме того, они попробуют разработать и оснастить робопчелу собственными сенсорами, с помощью которых микродрон смог бы садиться автономно, без использования внешнего оборудования для управления полетом. Другая команда инженеров недавно представила робота-прыгуна на основе миниатюрного махолета. Робот имеет массу меньше одного грамма и представляет собой микроорнитоптер снизу которого закреплена пассивная нога с пружинным элементом. Робот способен прыгать по заданной траектории, преодолевает высокие препятствия и даже способен выполнить сальто
 Владимир Степанов родился в 1940 году в Москве. Начал снимать в конце 1950-х годов. В 1957 году несколько любительских фотографий Степанова были напечатаны в «Вечерней Москве», затем началось сотрудничество с журналом «Советское фото». В 1958 году он стал работать в фотохронике ТАСС и в качестве внештатного корреспондента на Первом Международном Московском кинофестивале. Основной темой фотографий Владимира Степанова поначалу стал родной город. Фотограф ходил по улицам и бульварам, заглядывал во дворы и снимал жизнь города и его обитателей. В 1962 году Владимир Степанов участвовал в выставке «Наша молодость», которая состоялась в Парке Горького. В 1963 году он поступил на операторское отделение ВГИКа и с этого времени его основной профессией стала работа в кино. В 1967 году Степанов начал работать кинооператором и режиссёром на киностудии Министерства обороны СССР, а с 1976 года — кинооператором Творческого объединения «Экран». 1956. 2-я Мещанская улица 1956. Солнечный апрель. Цветной бульвар, 1956 1956. Третий лишний 1956. На тренировку. Волхонка 1956. Конвоир и пленный. Посёлок Быково 1956. Гости столицы. Красная площадь 1956. Самокатчики. Улица Волхонка 1956. Воскресенье в Сокольниках 1957. На закорках. Кузнецкий мост 1957. Собираем металлолом. В районе улицы Солянки 1957. На всякий случай. Театральная площадь 1957. Шахматы на Чистопрудном бульваре 1957. «Деревянная конница для детскиого мира» 1957. Банный переулок, 4. Зеркальная фабрика № 1 1957. Большой Ивановский переулок. Московские старушки во дворике 1957. Большой Ивановский переулок. Веловыезд 1957. В ЦПКиО имени Горького 1957 1957 1957. Магазин «Молоко» в Мансуровском переулке 1957. На площади Революции 1957. На Софийской набережной 1957. Петровка, 38 1957. Портик здания Большого театра 1957. Проспект Мира. Фестиваль 1957. Проспект Мира. Фестиваль 1957. Суворовцы 1957. Улица Дзержинского 1957. Улица Куйбышева 1957. «Верхом на заборе». Фурманный переулок 1957Ученые вырастили куриное мясо в лаборатори Исследователи из Токийского университета совершили прорыв в создании искусственного мяса, разработав биореактор, имитирующий кровеносную систему. Это позволило вырастить реалистичные куриные мышцы без использования традиционного животноводства. Новая система, описанная в журнале Trends in Biotechnology, произвела более 10 граммов структурированного куриного мяса, приближая возможность появления цельнокусочного культивируемого мяса на наших тарелках. Как это работает? Главной проблемой выращивания мяса в лаборатории была доставка кислорода и питательных веществ. В живых организмах эту функцию выполняют кровеносные сосуды, но в искусственных условиях диффузии недостаточно, особенно для толстых кусков мяса. Команда профессора Шоджи Такеучи использовала полупроницаемые полые волокна — аналогичные тем, что применяются в домашних фильтрах для воды и диализных аппаратах. Эти волокна имитируют кровеносные сосуды, обеспечивая питание тканей. Ученые создали биореактор с 50 волокнами, а затем масштабировали систему до 1100 волокон с помощью роботизированной сборки. В результате удалось получить более 10 граммов мяса с текстурой, близкой к натуральному. Польза не только для пищевой промышленности Эта технология может помочь в борьбе с птичьим гриппом, который угрожает продовольственной безопасности из-за массового забоя птиц. Кроме того, метод открывает перспективы для регенеративной медицины, тестирования лекарств и создания биогибридных роботов. Ученым предстоит решить несколько задач: улучшить доставку кислорода для более крупных тканей, автоматизировать удаление волокон после выращивания мяса и перейти на безопасные или даже съедобные материалы для биореактора. Хотя до массового производства культивируемого мяса еще далеко, этот прорыв приближает будущее, где искусственное мясо станет доступной и экологичной альтернативой традиционному.Шанхайский ресторан прославился благодаря десерту из слоновьих фекалий Создатели элитного ресторана в Шанхае позиционируют его как заведение с экологичной кухней. Недавно это место обрело популярность из-за шокирующей позиции в меню: там готовят блюдо из переработанного слоновьего навоза. Ресторан открыли двое предпринимателей: первый родом из Китая, второй — из Франции. На протяжении семи лет бизнес-партнёры изучали тропические леса китайской провинции Юньнань, затем «привезли» их в Шанхай, создав яркое фьюжн-заведение. В дегустационном сете много инновационных блюд: скажем, гости могут попробовать на вкус листья деревьев и кубики льда в медовой глазури. Однако самая громкая гастрономическая сенсация — десерт из стерилизованных высушенных слоновьих фекалий. В состав необычного десерта входит: собственно сам переработанный навоз в форме хрустящих крошек, а также фруктовый джем, пыльца и медовый сорбет. Всего за дегустацию 15 блюд посетители платят 3888 юаней (примерно 43 857 рублей).
Владимир Степанов родился в 1940 году в Москве. Начал снимать в конце 1950-х годов. В 1957 году несколько любительских фотографий Степанова были напечатаны в «Вечерней Москве», затем началось сотрудничество с журналом «Советское фото». В 1958 году он стал работать в фотохронике ТАСС и в качестве внештатного корреспондента на Первом Международном Московском кинофестивале. Основной темой фотографий Владимира Степанова поначалу стал родной город. Фотограф ходил по улицам и бульварам, заглядывал во дворы и снимал жизнь города и его обитателей. В 1962 году Владимир Степанов участвовал в выставке «Наша молодость», которая состоялась в Парке Горького. В 1963 году он поступил на операторское отделение ВГИКа и с этого времени его основной профессией стала работа в кино. В 1967 году Степанов начал работать кинооператором и режиссёром на киностудии Министерства обороны СССР, а с 1976 года — кинооператором Творческого объединения «Экран». 1956. 2-я Мещанская улица 1956. Солнечный апрель. Цветной бульвар, 1956 1956. Третий лишний 1956. На тренировку. Волхонка 1956. Конвоир и пленный. Посёлок Быково 1956. Гости столицы. Красная площадь 1956. Самокатчики. Улица Волхонка 1956. Воскресенье в Сокольниках 1957. На закорках. Кузнецкий мост 1957. Собираем металлолом. В районе улицы Солянки 1957. На всякий случай. Театральная площадь 1957. Шахматы на Чистопрудном бульваре 1957. «Деревянная конница для детскиого мира» 1957. Банный переулок, 4. Зеркальная фабрика № 1 1957. Большой Ивановский переулок. Московские старушки во дворике 1957. Большой Ивановский переулок. Веловыезд 1957. В ЦПКиО имени Горького 1957 1957 1957. Магазин «Молоко» в Мансуровском переулке 1957. На площади Революции 1957. На Софийской набережной 1957. Петровка, 38 1957. Портик здания Большого театра 1957. Проспект Мира. Фестиваль 1957. Проспект Мира. Фестиваль 1957. Суворовцы 1957. Улица Дзержинского 1957. Улица Куйбышева 1957. «Верхом на заборе». Фурманный переулок 1957Ученые вырастили куриное мясо в лаборатори Исследователи из Токийского университета совершили прорыв в создании искусственного мяса, разработав биореактор, имитирующий кровеносную систему. Это позволило вырастить реалистичные куриные мышцы без использования традиционного животноводства. Новая система, описанная в журнале Trends in Biotechnology, произвела более 10 граммов структурированного куриного мяса, приближая возможность появления цельнокусочного культивируемого мяса на наших тарелках. Как это работает? Главной проблемой выращивания мяса в лаборатории была доставка кислорода и питательных веществ. В живых организмах эту функцию выполняют кровеносные сосуды, но в искусственных условиях диффузии недостаточно, особенно для толстых кусков мяса. Команда профессора Шоджи Такеучи использовала полупроницаемые полые волокна — аналогичные тем, что применяются в домашних фильтрах для воды и диализных аппаратах. Эти волокна имитируют кровеносные сосуды, обеспечивая питание тканей. Ученые создали биореактор с 50 волокнами, а затем масштабировали систему до 1100 волокон с помощью роботизированной сборки. В результате удалось получить более 10 граммов мяса с текстурой, близкой к натуральному. Польза не только для пищевой промышленности Эта технология может помочь в борьбе с птичьим гриппом, который угрожает продовольственной безопасности из-за массового забоя птиц. Кроме того, метод открывает перспективы для регенеративной медицины, тестирования лекарств и создания биогибридных роботов. Ученым предстоит решить несколько задач: улучшить доставку кислорода для более крупных тканей, автоматизировать удаление волокон после выращивания мяса и перейти на безопасные или даже съедобные материалы для биореактора. Хотя до массового производства культивируемого мяса еще далеко, этот прорыв приближает будущее, где искусственное мясо станет доступной и экологичной альтернативой традиционному.Шанхайский ресторан прославился благодаря десерту из слоновьих фекалий Создатели элитного ресторана в Шанхае позиционируют его как заведение с экологичной кухней. Недавно это место обрело популярность из-за шокирующей позиции в меню: там готовят блюдо из переработанного слоновьего навоза. Ресторан открыли двое предпринимателей: первый родом из Китая, второй — из Франции. На протяжении семи лет бизнес-партнёры изучали тропические леса китайской провинции Юньнань, затем «привезли» их в Шанхай, создав яркое фьюжн-заведение. В дегустационном сете много инновационных блюд: скажем, гости могут попробовать на вкус листья деревьев и кубики льда в медовой глазури. Однако самая громкая гастрономическая сенсация — десерт из стерилизованных высушенных слоновьих фекалий. В состав необычного десерта входит: собственно сам переработанный навоз в форме хрустящих крошек, а также фруктовый джем, пыльца и медовый сорбет. Всего за дегустацию 15 блюд посетители платят 3888 юаней (примерно 43 857 рублей). Миниатюрный орнитоптер стал одноногим прыгуном Он может нести груз вдвое больше собственной массы Инженеры из США и Китая создали робота-прыгуна массой меньше грамма. Робот представляет собой миниатюрный орнитоптер, снизу которого закреплена пассивная нога с пружинным элементом. В отличие от прыгающих роботов с актуаторами в ногах, срабатывание которых происходит, пока робот находится на земле, новый робот приводится в движение и управляется крыльями орнитоптера. Робот способен прыгать по заданной траектории, преодолевает высокие препятствия и даже способен выполнить сальто. Статья опубликована в журнале Science Advances. Миниатюрные роботы размером с насекомое сталкиваются с двумя основными трудностями: ограниченным запасом энергии и необходимостью преодолевать препятствия, значительно превосходящие их собственные размеры. На таком масштабе проявляется главное преимущество роботов-прыгунов: в отличие от наземных роботов, они могут с легкостью перепрыгивать препятствия на пути, и при этом расходуют существенно меньше энергии в сравнении с летающими. В апреле 2024 года группа инженеров из Городского университета Гонконга представила необычного робота-прыгуна массой всего 35 грамм. Устройство, получившее название Hopcopter, представляло собой миниатюрный квадрокоптер, снизу которого была прикреплена пассивная телескопическая нога с пружиной. В отличие от других роботов-прыгунов с актуаторами в ногах, Hopcopter активировался пропеллерами в воздушной фазе прыжка, а во время контакта с поверхностью пружина в ноге накапливала энергию, а после, разжимаясь, помогала совершить новый прыжок. Винты квадрокоптера включались только в нужный момент, чтобы компенсировать потери энергии при контакте с поверхностью, стабилизировать робота в воздухе и нацелить его ногу на следующую точку. Теперь, чтобы сделать робопрыгуна еще меньше и легче, инженеры под совместным руководством Пакпонга Чирараттананона (Pakpong Chirarattananon) из Городского университета Гонконга и Юй Фэн Чэня (Yufeng Chen) из Массачусетского технологического института решили заменить квадрокоптер на разработанный ранее группой Чэня миниатюрный орнитоптер с несколькими крыльями. Были созданы два варианта робота массой менее грамма. Первый оснащен восемью крыльями и единственной опорой в виде пассивной пружины из изогнутых пластин углеродного волокна массой. Второй робот имеет только четыре крыла и более короткую ногу со стальной пружиной. На долю орнитоптера и ноги приходится около восьмидесяти и двадцати процентов массы соответственно. Крылья приводятся в движение диэлектрическими эластомерными актуаторами, работающими с частотой 330–400 герц. Они представляют собой свернутые в рулон полоски из чередующихся слоев эластомера и электродов из нанотрубок. При подаче на электроды напряжения, те притягиваются друг к другу, деформируя эластомер, благодаря чему актуатор сокращается в длину, как мышца. Как и у Hopcopter, эластичная нога, закрепленная снизу, накапливает и отдает энергию во время короткой (менее двадцати миллисекунд) фазы контакта с поверхностью. Далее следует фаза набора высоты, во время которой включаются крылья, помогая роботу компенсировать потерю энергии. На пике подъема система управления определяет следующую точку приземления, и с помощью крыльев ориентирует робота под нужным углом, после чего он падает к выбранной точке. Таким образом, крылья задействуются только для кратковременного набора высоты и корректировки положения, а не для полноценного полета. Высота прыжка робота может варьироваться от полутора до двадцати сантиметров. Частота прыжков — от 2 до 8,4 герца. Скорость вращения корпуса достигает 7200 градусов в секунду. Максимальная скорость перемещения составляет 32 сантиметра в секунду и практически равна скорости полета орнитоптера. В ходе испытаний оба робота успешно перемещались по различным поверхностям, включая твердые (дерево, стекло), скользкие (лед, стекло с разлитой водой), сыпучие (почва) и деформируемые (трава, плавающий на воде лист лотоса). Робот может прыгать по заданным точкам с ошибкой позиционирования около 2,9 сантиметра при высоте прыжка 7 сантиметров. Кроме этого, он способен преодолевать препятствия высотой до 5,5 сантиметра, успешно восстанавливает равновесие при столкновениях и может даже выполнить сальто между приземлениями. Благодаря использованию прыжков удалось снизить энергопотребление на 64 процента по сравнению с чистым полетом орнитоптера и увеличить полезную нагрузку более чем в десять раз — с двухсот миллиграмм до двух грамм, что в два раза превышает собственную массу робота. Благодаря этому, как считают инженеры, в будущем на борту можно будет разместить сенсоры, источник питания и другую необходимую электронику для автономной работы, которых сейчас нет — робот зависит от внешних систем. Кстати, прыжки рассматриваются и как один наиболее перспективных способов передвижения для роботов в условиях низкой гравитации и вакуума, как на небольших небесных телах типа астероидов или ледяных лун планет гигантов. Недавно стало известно о проекте одноногого робота LEAP, которого исследователи планируют отправить на Энцелад, чтобы изучить образцы нижней части водяных выбросов криовулканов.Это все конечно здорово, только стоит он, в 10 раз дороже mavic 3 🤦♂️ "Геоскан" показал процесс сборки своих БПЛА "Геоскан 801" на новом участке, открытом в январе 2025 года. Говорят, там осуществляется полный цикл производства этого БВС, в том числе производство деталей. Ну а мы можем посмотреть, как выглядит по-настоящему серийное производство дронов в России. 11211 (1).mp4Квантовая система навигации в 50 раз точнее GPS Современные самолеты, дроны и автомобили используют для навигации спутниковое позиционирование, однако, преступники или противники могут заглушить или исказить эти сигналы. Австралийская компания Q-CTRL объявила о первом полевом испытании квантовой навигационной системы, которая работает без глобальных систем позиционирования. Она устойчива к глушению и уже доказала, что работает намного точнее аналогов. Глушение сигналов GPS ежедневно мешает примерно тысячи полетам и приносит убытки в размере 1 млрд долларов США в сутки, говорится в пресс-релизе австралийской компании Q-CTRL. Между тем, существующие резервные системы GPS имеют серьезные недостатки. Новые решения для навигации без GPS стали стратегической технологией первостепенной важности. Q-CTRL выпустила новое поколение квантовой навигационной системы Ironstone Opal, которая обеспечивает геопозиционирование, полностью пассивна, ее невозможно обнаружить, заглушить или подделать. Система решает самые насущные навигационные задачи в оборонной и гражданской сферах, оптимизируя транспортные операции и обеспечивая работу автономных систем. Вместо сигналов спутников Q-CTRL получает данные магнитного поля Земли, которое немного меняется в зависимости от географической точки. Система может определять, где вы находитесь, измеряя эти изменения с помощью магнитометров. Для этого инженеры компании разработали крайне чувствительные и стабильные датчики. В комплекте идет специальное программное обеспечение на основе ИИ, которое фильтрует помехи, к примеру, вибрации или электромагнитный шум. Оборудование компактное и небольшое. Теоретически, его можно устанавливать на беспилотниках, автомобилях и, разумеется, самолетах. Серия испытаний технологии Q-CTRL на земле и в воздухе показала, что система действительно в состоянии работать совершенно независимо от GPS. Более того, компания сообщает, что ее квантовая навигация в 50 раз точнее традиционных аварийных систем позиционирования, таких как инерциальная навигация. Даже когда оборудование было установлено внутри самолета, где помехи намного сильнее, оно превосходило существующие системы как минимум в 11 раз. Это первый случай демонстрации квантового превосходства в реальных условиях, пишет IE. Благодаря своей скрытности, помехозащищенности и высокой точности технология весьма привлекательна для вооруженных сил, но может оказаться ценной для гражданской авиации, автономных транспортных средств и дронов.
Миниатюрный орнитоптер стал одноногим прыгуном Он может нести груз вдвое больше собственной массы Инженеры из США и Китая создали робота-прыгуна массой меньше грамма. Робот представляет собой миниатюрный орнитоптер, снизу которого закреплена пассивная нога с пружинным элементом. В отличие от прыгающих роботов с актуаторами в ногах, срабатывание которых происходит, пока робот находится на земле, новый робот приводится в движение и управляется крыльями орнитоптера. Робот способен прыгать по заданной траектории, преодолевает высокие препятствия и даже способен выполнить сальто. Статья опубликована в журнале Science Advances. Миниатюрные роботы размером с насекомое сталкиваются с двумя основными трудностями: ограниченным запасом энергии и необходимостью преодолевать препятствия, значительно превосходящие их собственные размеры. На таком масштабе проявляется главное преимущество роботов-прыгунов: в отличие от наземных роботов, они могут с легкостью перепрыгивать препятствия на пути, и при этом расходуют существенно меньше энергии в сравнении с летающими. В апреле 2024 года группа инженеров из Городского университета Гонконга представила необычного робота-прыгуна массой всего 35 грамм. Устройство, получившее название Hopcopter, представляло собой миниатюрный квадрокоптер, снизу которого была прикреплена пассивная телескопическая нога с пружиной. В отличие от других роботов-прыгунов с актуаторами в ногах, Hopcopter активировался пропеллерами в воздушной фазе прыжка, а во время контакта с поверхностью пружина в ноге накапливала энергию, а после, разжимаясь, помогала совершить новый прыжок. Винты квадрокоптера включались только в нужный момент, чтобы компенсировать потери энергии при контакте с поверхностью, стабилизировать робота в воздухе и нацелить его ногу на следующую точку. Теперь, чтобы сделать робопрыгуна еще меньше и легче, инженеры под совместным руководством Пакпонга Чирараттананона (Pakpong Chirarattananon) из Городского университета Гонконга и Юй Фэн Чэня (Yufeng Chen) из Массачусетского технологического института решили заменить квадрокоптер на разработанный ранее группой Чэня миниатюрный орнитоптер с несколькими крыльями. Были созданы два варианта робота массой менее грамма. Первый оснащен восемью крыльями и единственной опорой в виде пассивной пружины из изогнутых пластин углеродного волокна массой. Второй робот имеет только четыре крыла и более короткую ногу со стальной пружиной. На долю орнитоптера и ноги приходится около восьмидесяти и двадцати процентов массы соответственно. Крылья приводятся в движение диэлектрическими эластомерными актуаторами, работающими с частотой 330–400 герц. Они представляют собой свернутые в рулон полоски из чередующихся слоев эластомера и электродов из нанотрубок. При подаче на электроды напряжения, те притягиваются друг к другу, деформируя эластомер, благодаря чему актуатор сокращается в длину, как мышца. Как и у Hopcopter, эластичная нога, закрепленная снизу, накапливает и отдает энергию во время короткой (менее двадцати миллисекунд) фазы контакта с поверхностью. Далее следует фаза набора высоты, во время которой включаются крылья, помогая роботу компенсировать потерю энергии. На пике подъема система управления определяет следующую точку приземления, и с помощью крыльев ориентирует робота под нужным углом, после чего он падает к выбранной точке. Таким образом, крылья задействуются только для кратковременного набора высоты и корректировки положения, а не для полноценного полета. Высота прыжка робота может варьироваться от полутора до двадцати сантиметров. Частота прыжков — от 2 до 8,4 герца. Скорость вращения корпуса достигает 7200 градусов в секунду. Максимальная скорость перемещения составляет 32 сантиметра в секунду и практически равна скорости полета орнитоптера. В ходе испытаний оба робота успешно перемещались по различным поверхностям, включая твердые (дерево, стекло), скользкие (лед, стекло с разлитой водой), сыпучие (почва) и деформируемые (трава, плавающий на воде лист лотоса). Робот может прыгать по заданным точкам с ошибкой позиционирования около 2,9 сантиметра при высоте прыжка 7 сантиметров. Кроме этого, он способен преодолевать препятствия высотой до 5,5 сантиметра, успешно восстанавливает равновесие при столкновениях и может даже выполнить сальто между приземлениями. Благодаря использованию прыжков удалось снизить энергопотребление на 64 процента по сравнению с чистым полетом орнитоптера и увеличить полезную нагрузку более чем в десять раз — с двухсот миллиграмм до двух грамм, что в два раза превышает собственную массу робота. Благодаря этому, как считают инженеры, в будущем на борту можно будет разместить сенсоры, источник питания и другую необходимую электронику для автономной работы, которых сейчас нет — робот зависит от внешних систем. Кстати, прыжки рассматриваются и как один наиболее перспективных способов передвижения для роботов в условиях низкой гравитации и вакуума, как на небольших небесных телах типа астероидов или ледяных лун планет гигантов. Недавно стало известно о проекте одноногого робота LEAP, которого исследователи планируют отправить на Энцелад, чтобы изучить образцы нижней части водяных выбросов криовулканов.Это все конечно здорово, только стоит он, в 10 раз дороже mavic 3 🤦♂️ "Геоскан" показал процесс сборки своих БПЛА "Геоскан 801" на новом участке, открытом в январе 2025 года. Говорят, там осуществляется полный цикл производства этого БВС, в том числе производство деталей. Ну а мы можем посмотреть, как выглядит по-настоящему серийное производство дронов в России. 11211 (1).mp4Квантовая система навигации в 50 раз точнее GPS Современные самолеты, дроны и автомобили используют для навигации спутниковое позиционирование, однако, преступники или противники могут заглушить или исказить эти сигналы. Австралийская компания Q-CTRL объявила о первом полевом испытании квантовой навигационной системы, которая работает без глобальных систем позиционирования. Она устойчива к глушению и уже доказала, что работает намного точнее аналогов. Глушение сигналов GPS ежедневно мешает примерно тысячи полетам и приносит убытки в размере 1 млрд долларов США в сутки, говорится в пресс-релизе австралийской компании Q-CTRL. Между тем, существующие резервные системы GPS имеют серьезные недостатки. Новые решения для навигации без GPS стали стратегической технологией первостепенной важности. Q-CTRL выпустила новое поколение квантовой навигационной системы Ironstone Opal, которая обеспечивает геопозиционирование, полностью пассивна, ее невозможно обнаружить, заглушить или подделать. Система решает самые насущные навигационные задачи в оборонной и гражданской сферах, оптимизируя транспортные операции и обеспечивая работу автономных систем. Вместо сигналов спутников Q-CTRL получает данные магнитного поля Земли, которое немного меняется в зависимости от географической точки. Система может определять, где вы находитесь, измеряя эти изменения с помощью магнитометров. Для этого инженеры компании разработали крайне чувствительные и стабильные датчики. В комплекте идет специальное программное обеспечение на основе ИИ, которое фильтрует помехи, к примеру, вибрации или электромагнитный шум. Оборудование компактное и небольшое. Теоретически, его можно устанавливать на беспилотниках, автомобилях и, разумеется, самолетах. Серия испытаний технологии Q-CTRL на земле и в воздухе показала, что система действительно в состоянии работать совершенно независимо от GPS. Более того, компания сообщает, что ее квантовая навигация в 50 раз точнее традиционных аварийных систем позиционирования, таких как инерциальная навигация. Даже когда оборудование было установлено внутри самолета, где помехи намного сильнее, оно превосходило существующие системы как минимум в 11 раз. Это первый случай демонстрации квантового превосходства в реальных условиях, пишет IE. Благодаря своей скрытности, помехозащищенности и высокой точности технология весьма привлекательна для вооруженных сил, но может оказаться ценной для гражданской авиации, автономных транспортных средств и дронов. Автономный дрон победил человека в гонке. Видео с камеры пипец конечно
Автономный дрон победил человека в гонке. Видео с камеры пипец конечно





Аккаунт
Навигация
Поиск
Configure browser push notifications
Chrome (Android)
- Tap the lock icon next to the address bar.
- Tap Permissions → Notifications.
- Adjust your preference.
Chrome (Desktop)
- Click the padlock icon in the address bar.
- Select Site settings.
- Find Notifications and adjust your preference.
Safari (iOS 16.4+)
- Ensure the site is installed via Add to Home Screen.
- Open Settings App → Notifications.
- Find your app name and adjust your preference.
Safari (macOS)
- Go to Safari → Preferences.
- Click the Websites tab.
- Select Notifications in the sidebar.
- Find this website and adjust your preference.
Edge (Android)
- Tap the lock icon next to the address bar.
- Tap Permissions.
- Find Notifications and adjust your preference.
Edge (Desktop)
- Click the padlock icon in the address bar.
- Click Permissions for this site.
- Find Notifications and adjust your preference.
Firefox (Android)
- Go to Settings → Site permissions.
- Tap Notifications.
- Find this site in the list and adjust your preference.
Firefox (Desktop)
- Open Firefox Settings.
- Search for Notifications.
- Find this site in the list and adjust your preference.